

Target object dynamic adaptation method applied to sorting by conveyor belt
A target object, dynamic adaptation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to make adaptive changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions provided by the present invention will be further described below in conjunction with the accompanying drawings.
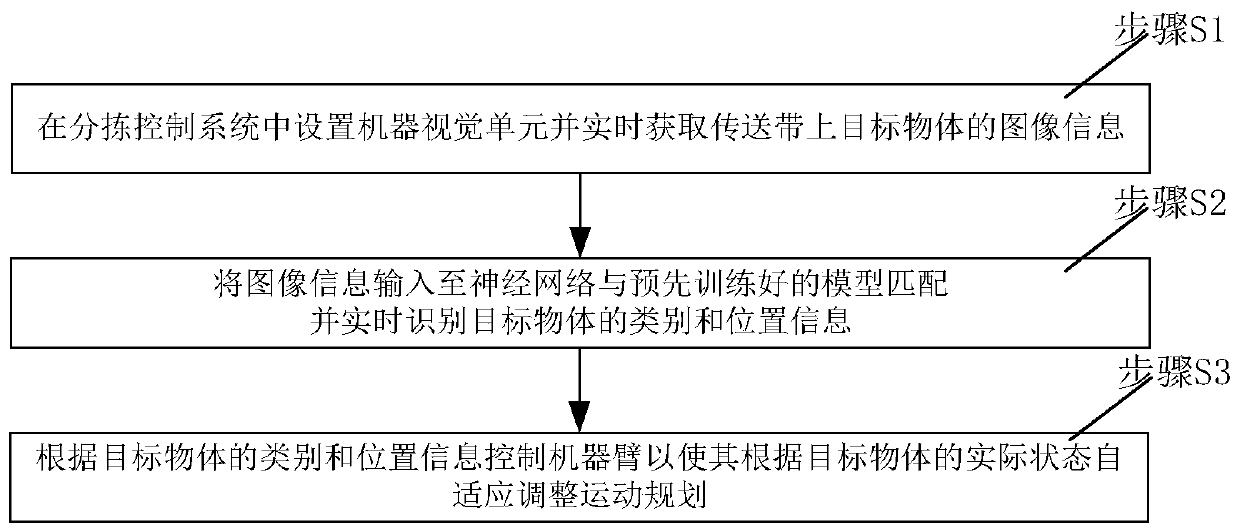
[0029] see figure 1 , which is a flow chart of a method for dynamically adapting a target object applied to conveyor belt sorting according to the present invention, which at least includes the following steps:
[0030] Step S1: Set up a machine vision unit in the sorting control system and acquire the image information of the target object on the conveyor belt in real time;
[0031] Step S2: Input the image information into the neural network to match the pre-trained recognition model and recognize the category and location information of the target object in real time;
[0032] Step S3: Control the robot arm according to the category and position information of the target object so that it can adaptively adjust the motion planning according to the actual state of the target object;
[0033] Wherein, in the step S2, training the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More