

Unmanned vehicle positioning method based on multi-sensor data fusion
A data fusion and multi-sensor technology, applied in satellite radio beacon positioning systems, instruments, radio wave measurement systems, etc., can solve the problems of inertial navigation equipment error accumulation over time, poor real-time performance of lidar and visual sensors, and satellite navigation receivers Poor continuity and other issues, to achieve the effect of reliable high-precision positioning data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
[0036] A method for positioning an unmanned vehicle based on multi-sensor data fusion, comprising the steps of:
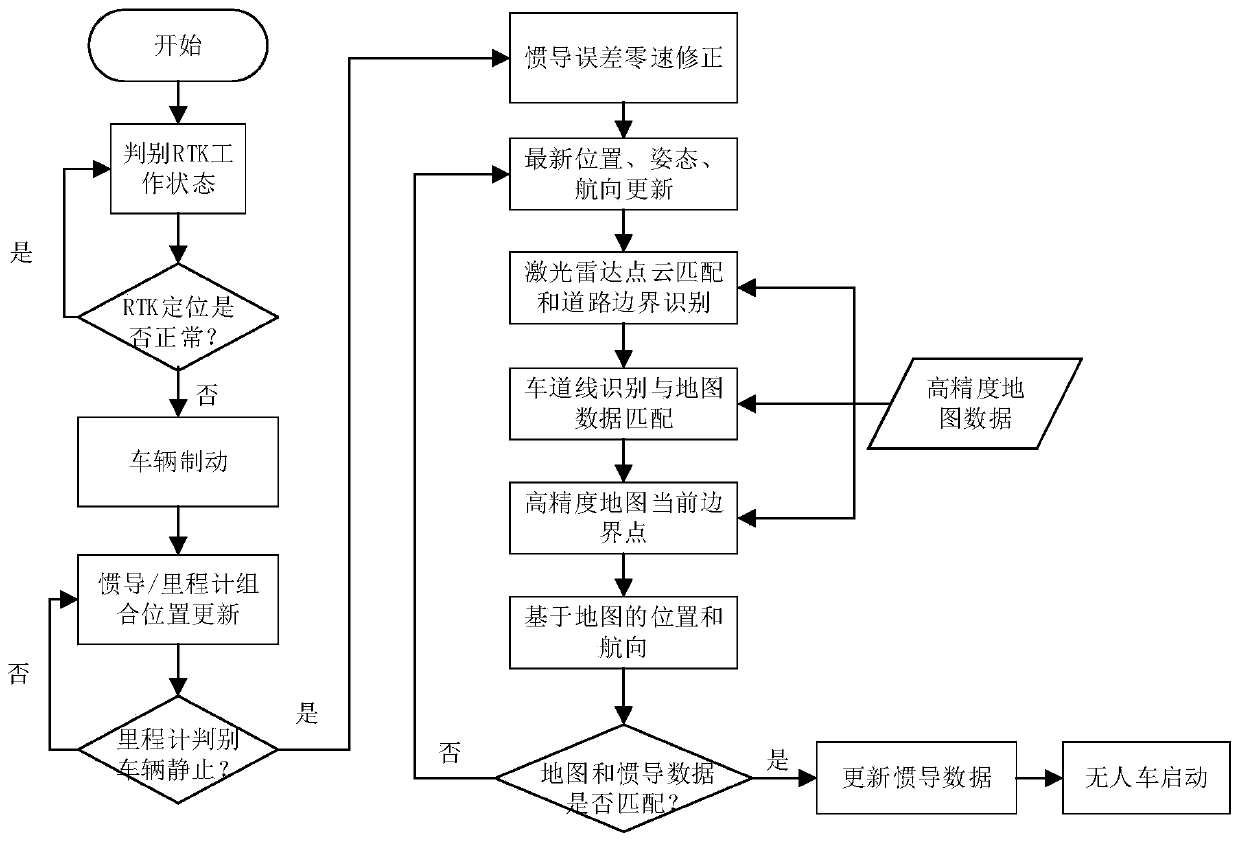
[0037] (1) Through the positioning data output by the satellite navigation receiver, the validity of the data is monitored in real time. When either of the two situations of PDOP>5 and the number of visible stars is less than or equal to 4, it is judged that the availability of satellite positioning data has decreased;
[0038] (2) When the availability of satellite positioning data declines, the unmanned vehicle brakes. During the braking process, the positioning position is updated through the fusion of the odometer and inertial navigation data. After the vehicle is stationary, the pitch angle error of the inertial navigation equipment, Roll angle error, heading angle error, accelerometer and gyroscope constant value error are corrected, the specific proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More