

Flight track determination method and system for networked UAV (unmanned aerial vehicle)
A technology of flight trajectory and UAV, which is applied in the field of UAV, and can solve problems such as high algorithm complexity, lack of feasibility analysis of flight missions, and crash of networked UAVs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
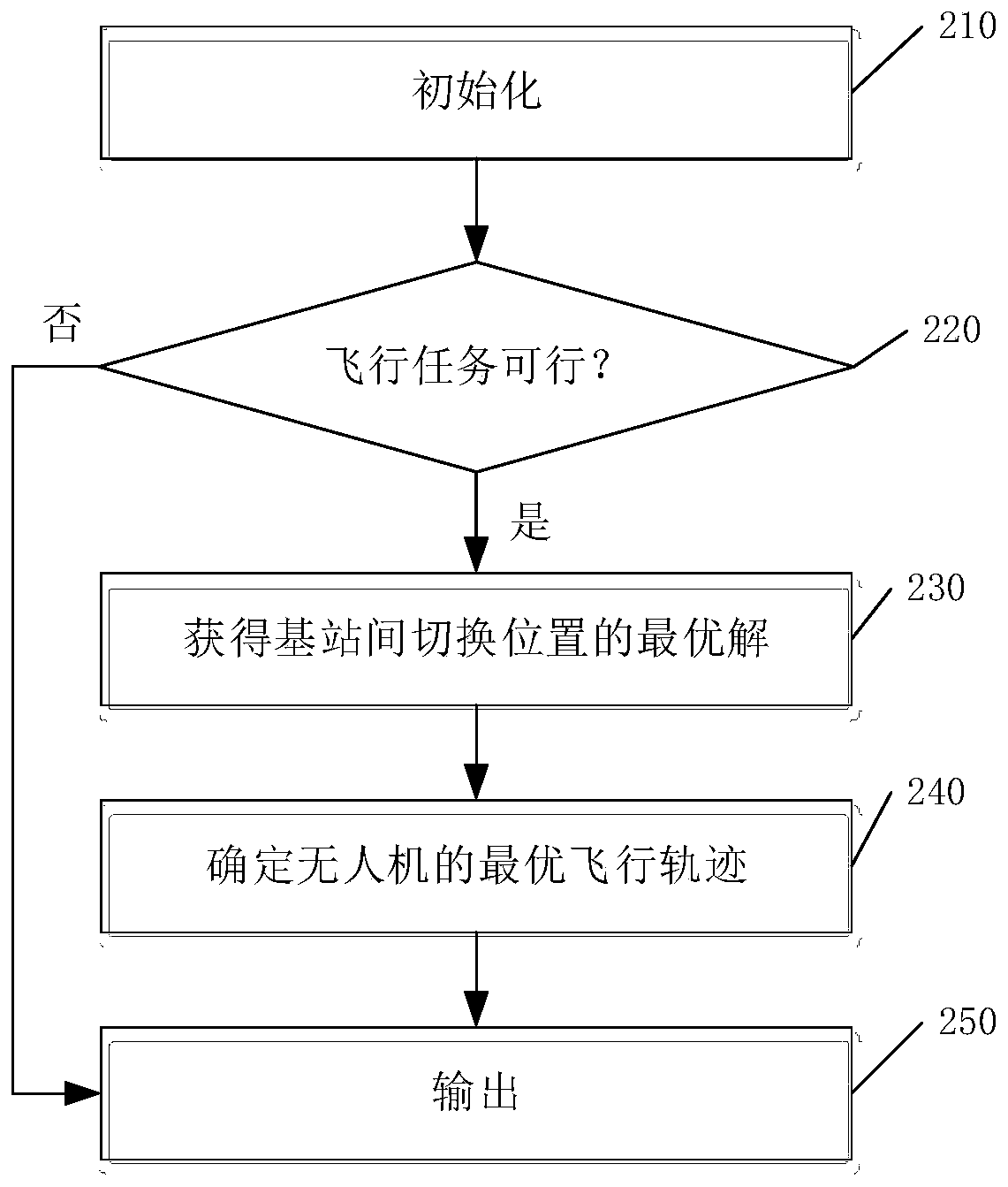
[0050] figure 2 It is a flowchart of a method for determining a flight trajectory of a networked drone according to an embodiment of the present application. like figure 2 As shown, the method includes the following steps:
[0051] Step 210: Initialization: Before the system works, an initialization operation is required. input starting point u 0 , end u F , starting point u 0 with endpoint u F All base station locations between g i , the constant flight height H of the UAV, the constant flight speed V of the UAV and the radius R of the maximum coverage area of the base station. Among them, the starting point u 0 and terminal u F Not within the coverage of the same base station, the flight speed of the UAV is within the maximum and minimum flight speed range of the UAV, the radius R of the maximum coverage area of the base station is determined according to the signal-to-noise ratio, the formula is as follows:
[0052]
[0053]
[0054] Among them, γ 0 I...
Embodiment 2
[0096] The present application also provides a system for determining the flight trajectory of the networked unmanned aerial vehicle corresponding to the above method, such as Image 6 As shown, the system includes an initialization module 610 , a feasibility analysis module 620 , an optimal switching position acquisition module 630 , a flight path determination module 640 and an output module 650 .
[0097] The initialization module 610 is used to input the starting point u 0 , end u F and the starting point u 0 with endpoint u F Between the base station locations, the start and end points are not within the coverage of the same base station.
[0098] The feasibility analysis module 620 is connected with the initialization module 610 , the switching position optimal solution acquisition module 630 and the output module 650 , and the feasibility analysis module 620 is used to analyze the feasibility of the flight mission under each path.
[0099] The switching position opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More