

A calibration method for laser radar and camera data
A laser radar and calibration method technology, applied in image data processing, image analysis, instruments, etc., can solve the problems of unable to meet the calibration requirements, low consistency of calibration results, low calibration accuracy of low beam laser radar, etc., and achieve good consistency , easy operation, high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
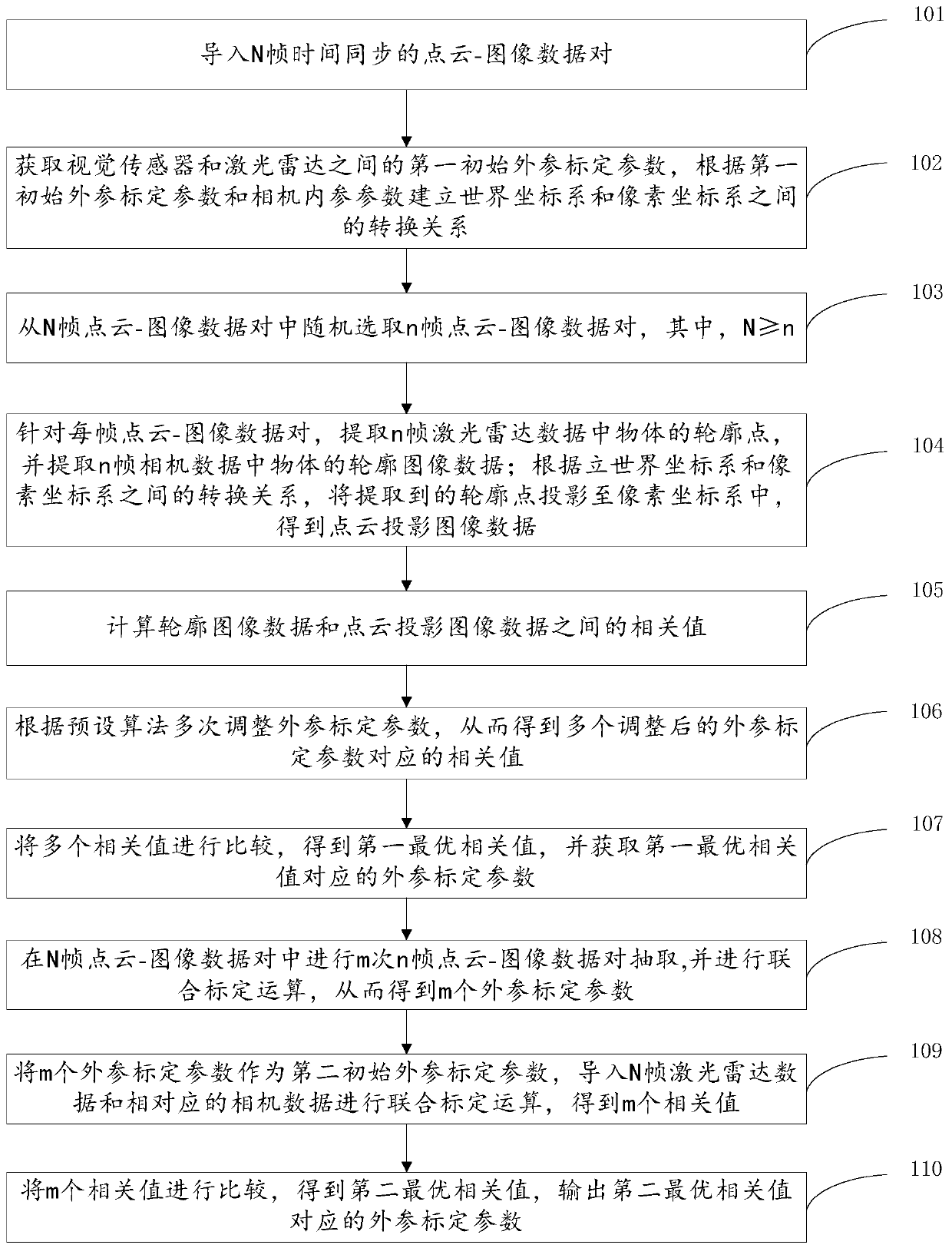
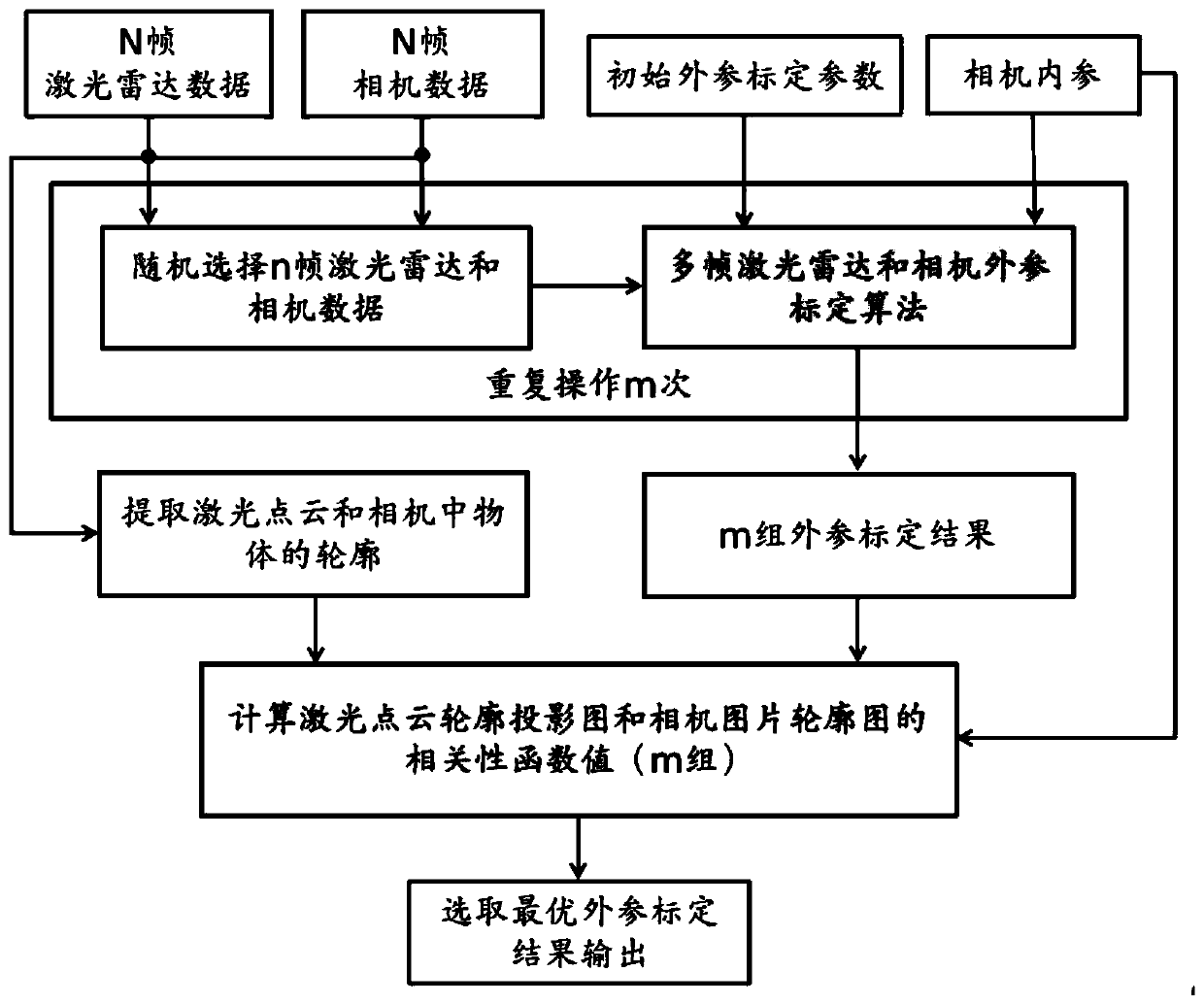
[0047] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
[0048] In the calibration method for laser radar and camera data provided by the embodiment of the present invention, the input is laser radar point cloud data, camera data, initial external parameter calibration parameters, camera internal parameter parameters, and the output is external parameter calibration after successful calibration parameter. Therefore, before performing external parameter calibration, it is necessary to collect enough relevant data to support the operation of the algorithm. The following first introduces the automatic data collection method of lidar and camera.
[0049] First, initialize the system, and judge whether the initialization is successful according to the validity of the image data and point cloud data collected by the system vision sensor and lidar. Specifically, analyze the point c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More