

View registration method, system and equipment based on dual quaternion and storage medium
A dual quaternion and registration technology, applied to systems, devices and storage media, in the field of view registration methods based on dual quaternions, can solve problems such as registration failure and low registration accuracy, and achieve reduced registration Error, the effect of improving the registration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
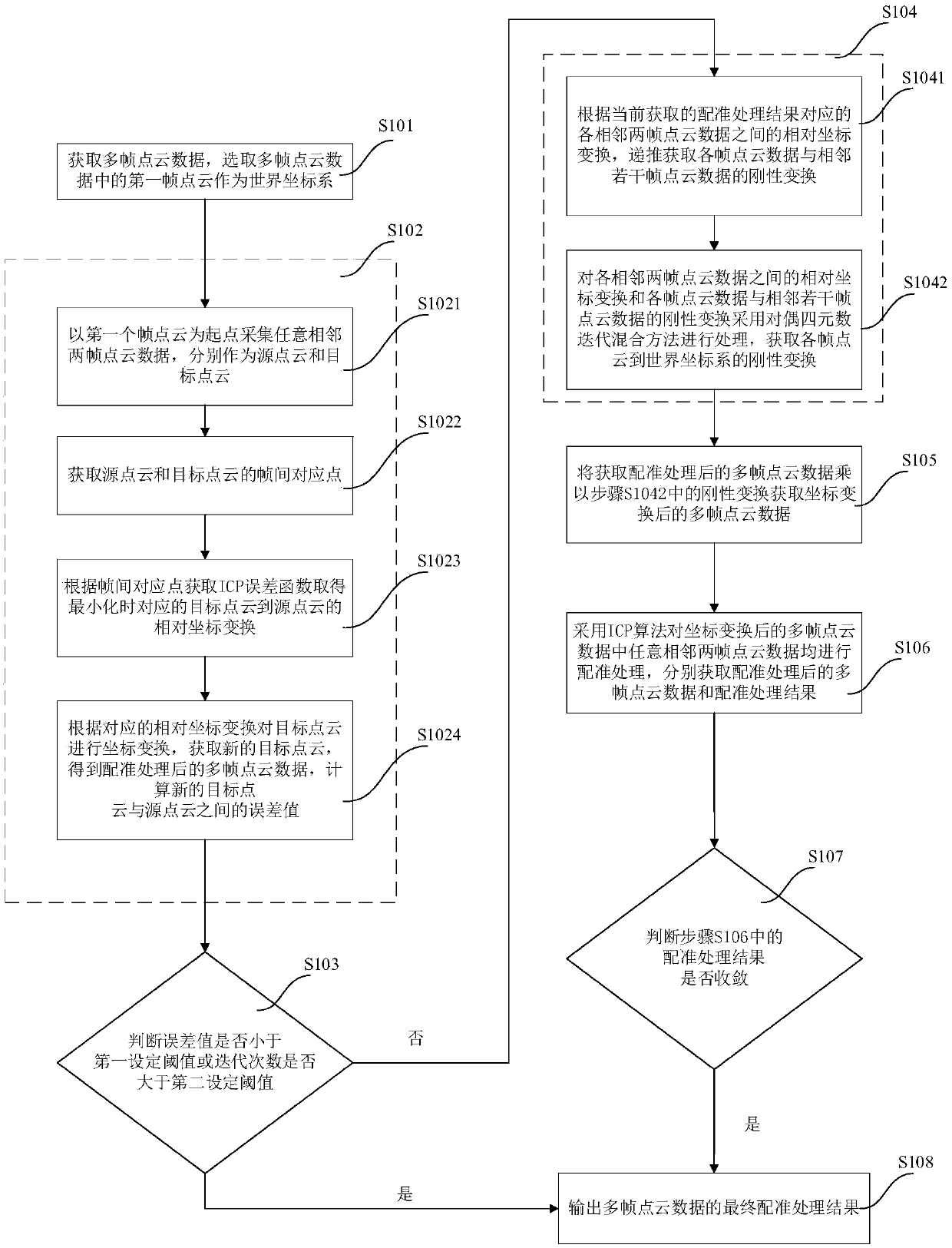
[0074] like figure 1 As shown, the dual quaternion-based multi-view registration method of this embodiment includes:
[0075] S101. Acquire multi-frame point cloud data, and select the first frame point cloud in the multi-frame point cloud data as a world coordinate system;
[0076] S102. Use the ICP algorithm to perform registration processing on any two adjacent frames of point cloud data in the multi-frame point cloud data, and obtain the multi-frame point cloud data after registration processing and the registration processing result; wherein, the registration processing The result is the first registration processing result;
[0077] Step S102 specifically includes:
[0078] S1021. Taking the point cloud of the first frame as a starting point, collect any two adjacent frames of point cloud data as source point cloud and target point cloud respectively;
[0079] Among them, when selecting the source point cloud and the target point cloud in the iterative process of the ...
Embodiment 2
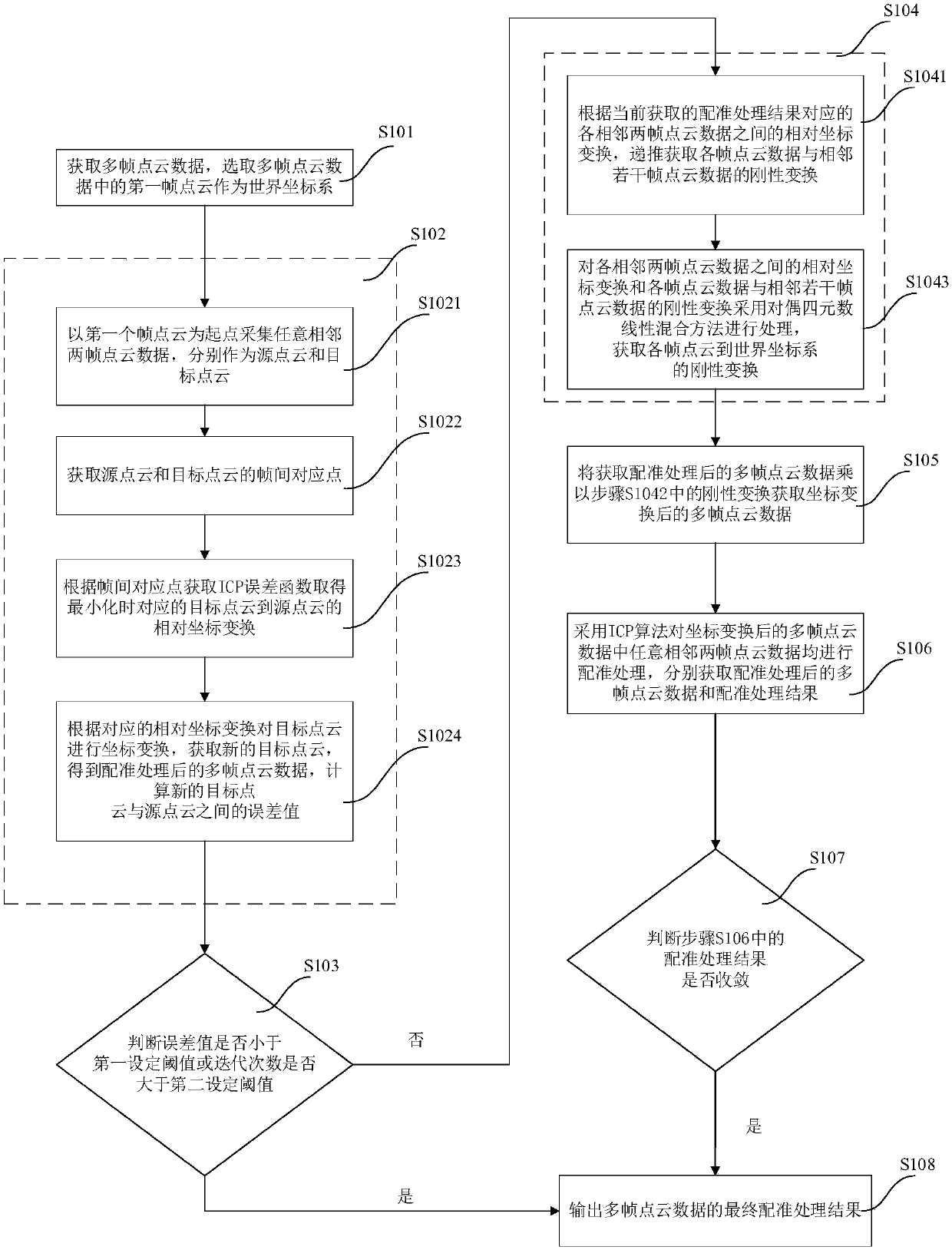
[0140] like image 3 As shown, the difference between this embodiment and the dual quaternion-based multi-view registration method in Embodiment 1 is that step 1042 is different, specifically:
[0141] Step 1043, the relative coordinate transformation between the two adjacent frames of point cloud data and the rigid transformation between the point cloud data of each frame and several adjacent frames of point cloud data are processed by dual quaternion linear hybrid method, Obtain the rigid transformation of each frame point cloud to the world coordinate system;
[0142] Wherein, the several adjacent frames of point cloud data are used to represent several frames of point cloud data adjacent to the left and right of each frame of point cloud data.
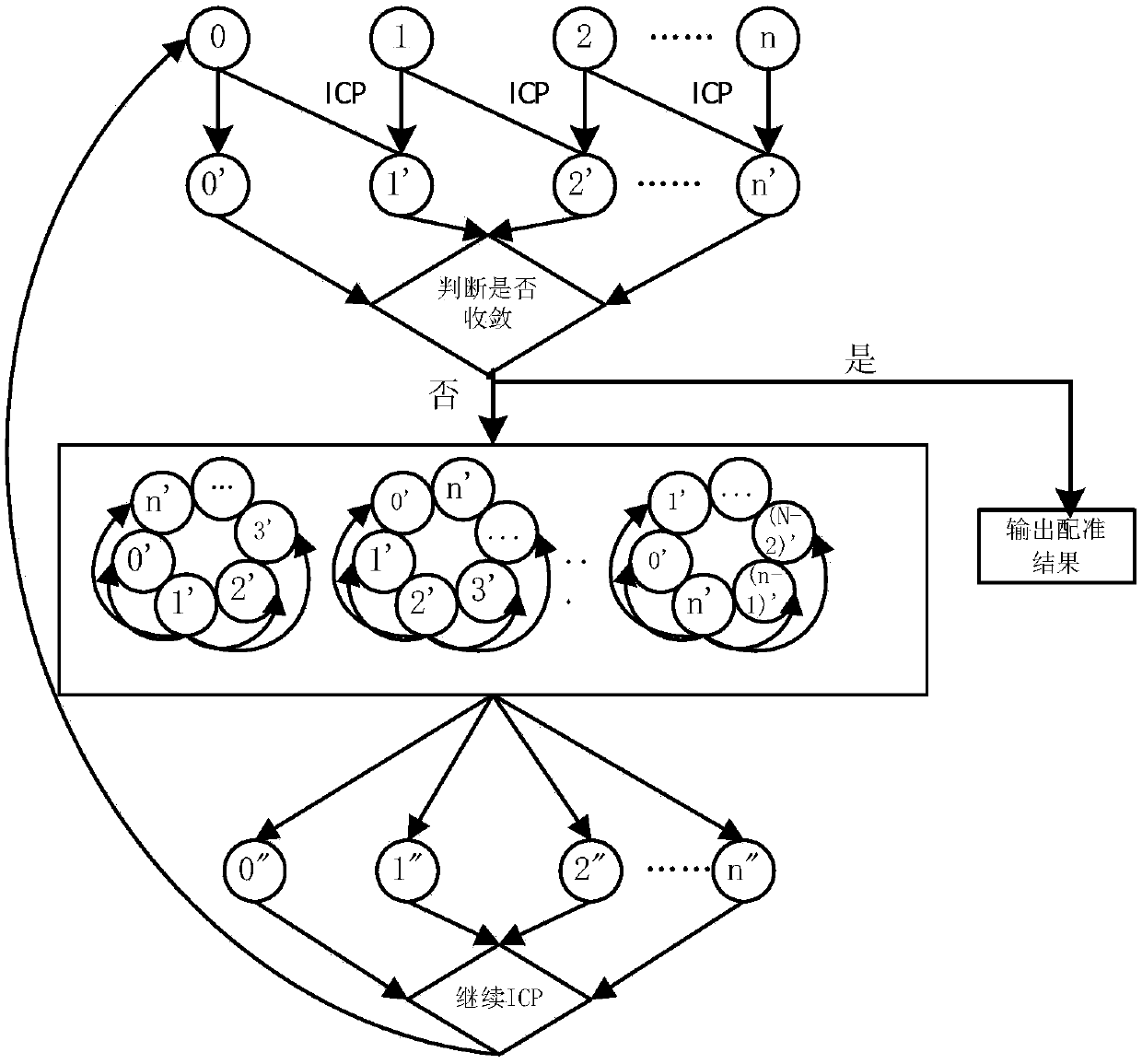
[0143] Specifically, such as figure 2 As shown, when the dual quaternion linear hybrid method is used in step 104 to process each frame of point cloud data in the multi-frame point cloud data in step S102 and two adjacent frames...
Embodiment 3
[0164] like Figure 4 As shown, the multi-view registration system based on dual quaternions in this embodiment includes a first point cloud data acquisition module 1, a first registration processing module 2, a first judgment module 3, a selection unit 4, and a rigid transformation acquisition module 5. A second point cloud data acquisition module 6 , a second registration processing module 7 , a second judging module 8 and an output module 9 .
[0165] The first point cloud data acquisition module 1 is used to acquire multi-frame point cloud data;
[0166] The selection unit 4 is used to select the first frame point cloud in the multi-frame point cloud data as the world coordinate system;
[0167] The first registration processing module 2 uses the ICP algorithm to perform registration processing on any two adjacent frames of point cloud data in the multi-frame point cloud data, and obtains multi-frame point cloud data and registration processing results after registration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More