

Cleaning control method, cleaning control device, cleaning robot and storage medium
A technology of cleaning robot and control method, applied in the field of smart equipment, capable of solving problems such as polluting cleaning areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
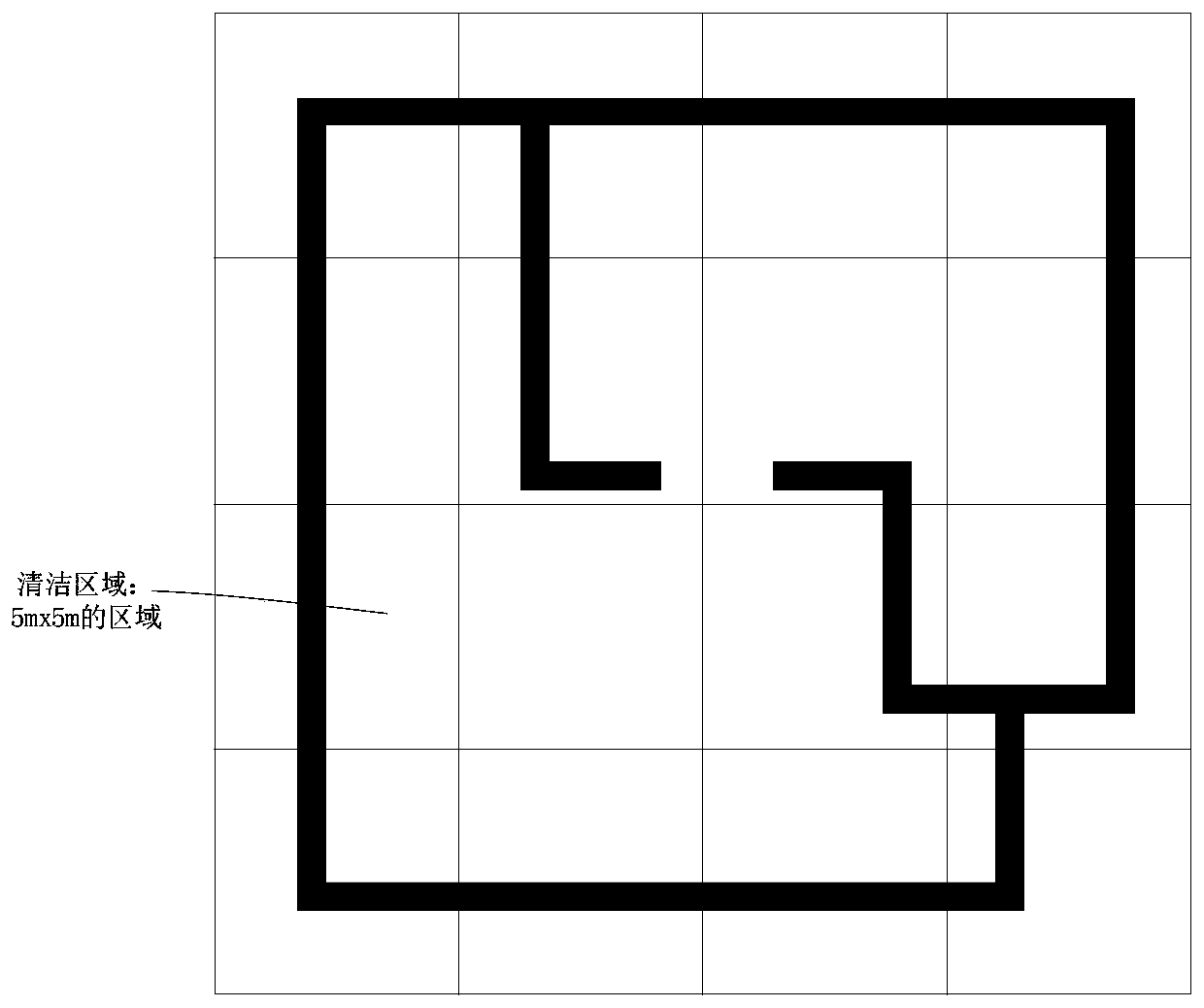
[0343] The embodiment of the present application provides a cleaning control method, see Figure 14 , the embodiment of the present application takes the space to be cleaned as a room unit, and the room unit is a regular room unit, and the cleaning robot 100 directly uses the room unit as a cleaning area to perform cleaning operations on the room unit as an example. The method include:
[0344] Step S1401: The cleaning robot 100 acquires a map of the space to be cleaned as a first space map.
[0345] The execution timing of the cleaning control method in all the embodiments of the present application may be: no edge cleaning, or a part of the area has been cleaned, or the end of edge cleaning and before bow-shaped cleaning starts. Wherein, the cleaning along the edge is that the cleaning robot 100 cleans the wall along the ground, and the end of the cleaning along the edge can be that the cleaning robot 100 completes the cleaning along the edge of the wall in the space to be ...
Embodiment 2
[0397] The embodiment of the present application provides a cleaning control method, see Figure 23 In the embodiment of the present application, the space to be cleaned is regarded as a room unit, and the room unit is an irregular room unit. The cleaning robot 100 scans the first space map through horizontal scanning lines, divides the space to be cleaned into at least one cleaning area, and directly Taking the acyclic connected graph as an area sequence tree, according to the area sequence tree, set the cleaning order, and do not encounter obstacles during the cleaning operation of the room unit as an example. The method includes:
[0398] Step S2301: The cleaning robot 100 acquires a map of the space to be cleaned as a first space map.
[0399] Step S2301 is the same as step S1401 and will not be repeated here. For example, the first space map acquired by the cleaning robot 100 is Figure 24 The map shown.
[0400] Step S2302: The cleaning robot 100 judges the first spac...
Embodiment 3
[0475] The embodiment of the present application provides a cleaning control method, see Figure 34 In the embodiment of the present application, the space to be cleaned is regarded as a room unit, and the room unit is an irregular room unit. The cleaning robot 100 scans the first space map through horizontal scanning lines, divides the space to be cleaned into at least one cleaning area, and divides the space to be cleaned into at least one cleaning area. After de-ringing the connected graph with rings, the area sequence tree is obtained. According to the area sequence tree, the cleaning order is set, and no obstacles are encountered during the cleaning operation of the room unit. The method includes :
[0476] Step S3401: The cleaning robot 100 acquires a map of the space to be cleaned as a first space map.
[0477] Step S3402: The cleaning robot 100 judges the first space map, and if the first space map is irregular, execute step S3403.
[0478] Step S3403: Based on the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More