

System and method for dynamically matching clamping force of stacking robot
A stacking robot and dynamic matching technology, applied in the field of automatic matching of robot clamping force, can solve problems such as excessive clamping force and energy loss, avoid over-clamping and under-clamping, high clamping reliability, and realize The effect of adaptive matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
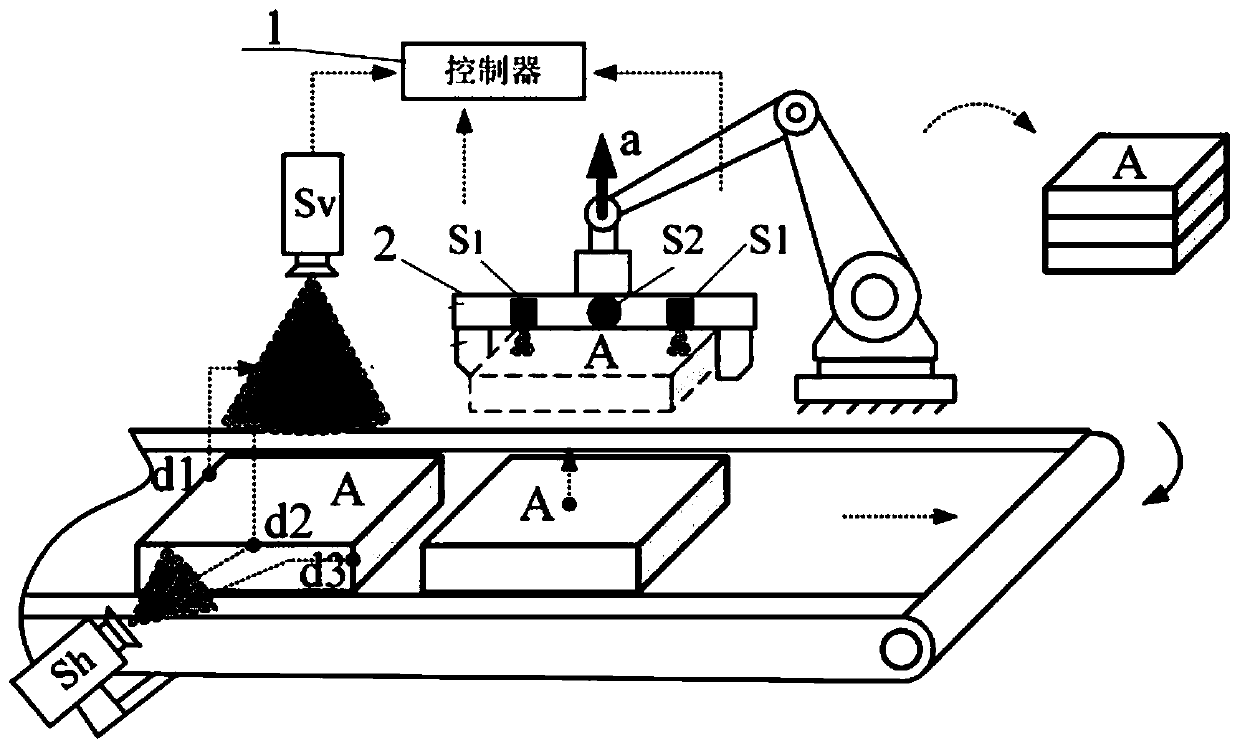
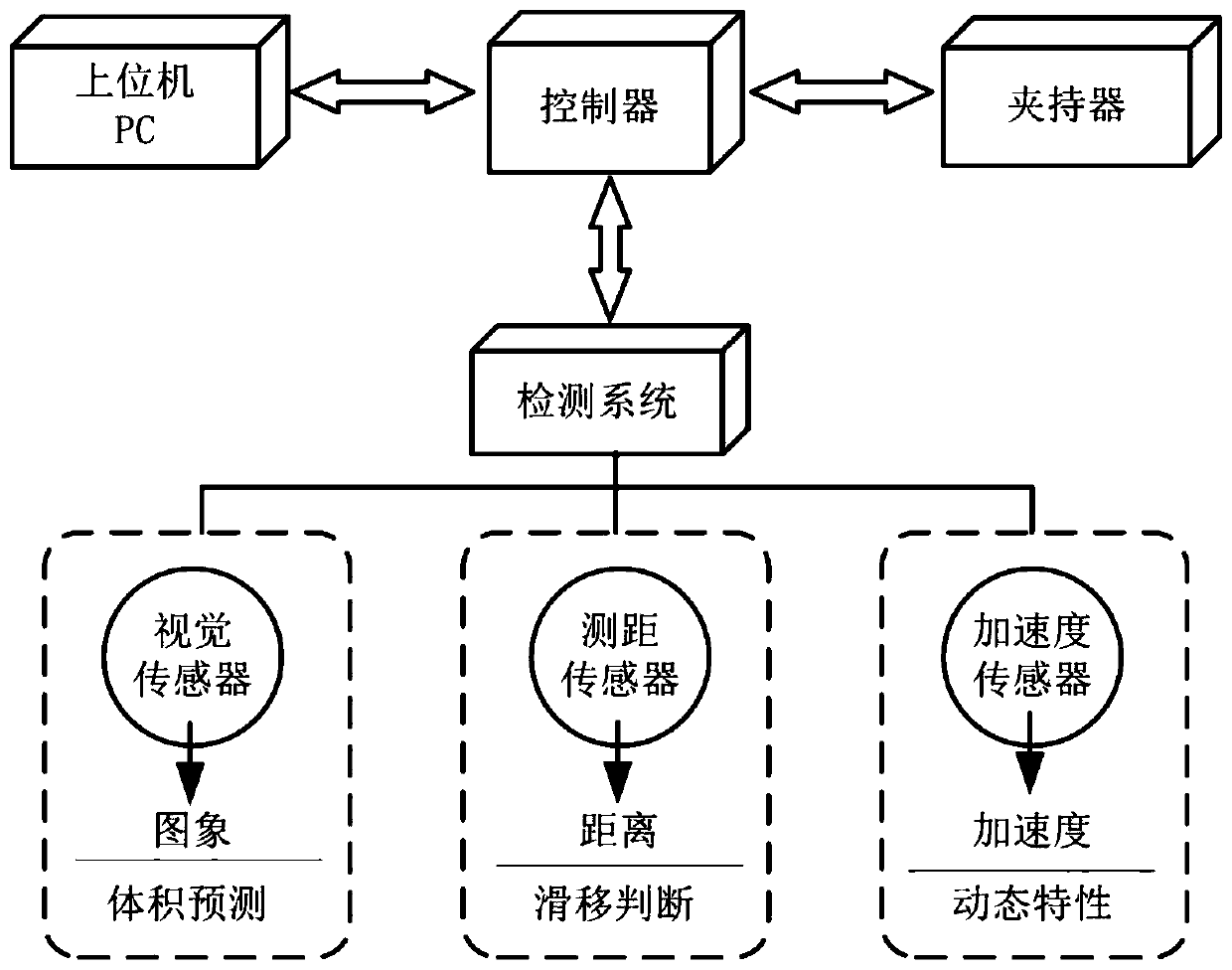
[0025] like figure 1 As shown, a stacking robot clamping force dynamic matching system includes a host computer PC, a controller 1, a detection system and a gripper 2, and the detection system includes a visual sensor, two ranging sensors S1 and an acceleration sensor S2 , the visual sensor includes a horizontal visual sensor Sh and a vertical visual sensor Sv respectively arranged on one side and above the conveyor belt of the workpiece A, and the distance me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More