

Vision-based automatic guided vehicle positioning method
A technology of automatic guided vehicle and positioning method, applied in the field of robot vision, to achieve the effect of high real-time positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
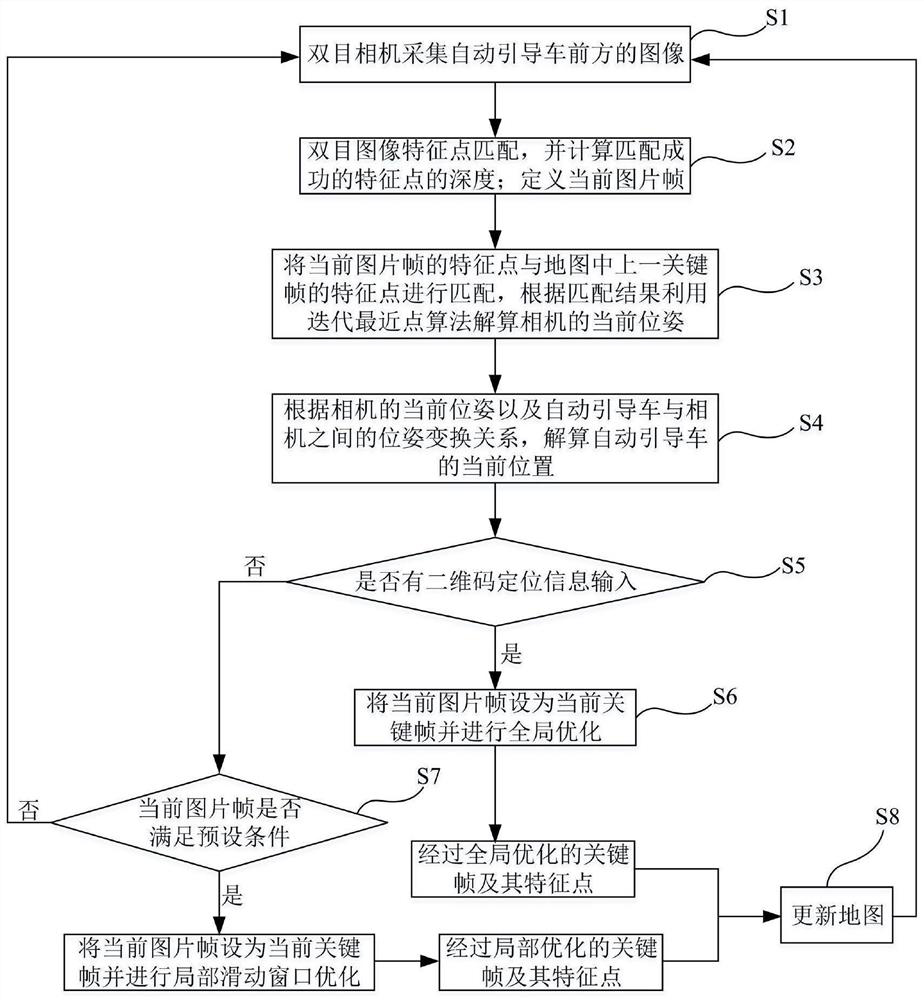
[0023] The specific embodiment of the present invention provides a visual automatic guidance vehicle positioning method, using visual milemeter technology as the primary positioning means, and uses two-dimensional code positioning techniques in the real-time positioning process to constantly correct the visual milemeter Cumulative error, reference figure 1 The positioning method of the present invention includes steps S1 to S8 as follows:
[0024] S1, using bicomponcences to collect images in front of the automatic boot car in real time, each time, the left-eyed image and right image can be obtained. Among them, the preparation of the capture image includes: use the Zhang's calibration method, with a chessboard to calibrate the binocular camera, so that the calibration camera is unclear, the imaging plane is on the same plane, and the polar line is l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More