

Cognitive map construction method based on space and motion joint coding
A technology of joint coding and construction methods, applied in the field of map construction, can solve problems such as inability to integrate into people and mobile robots not reaching the practical level.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] The present invention will be further described in detail below in conjunction with the examples.
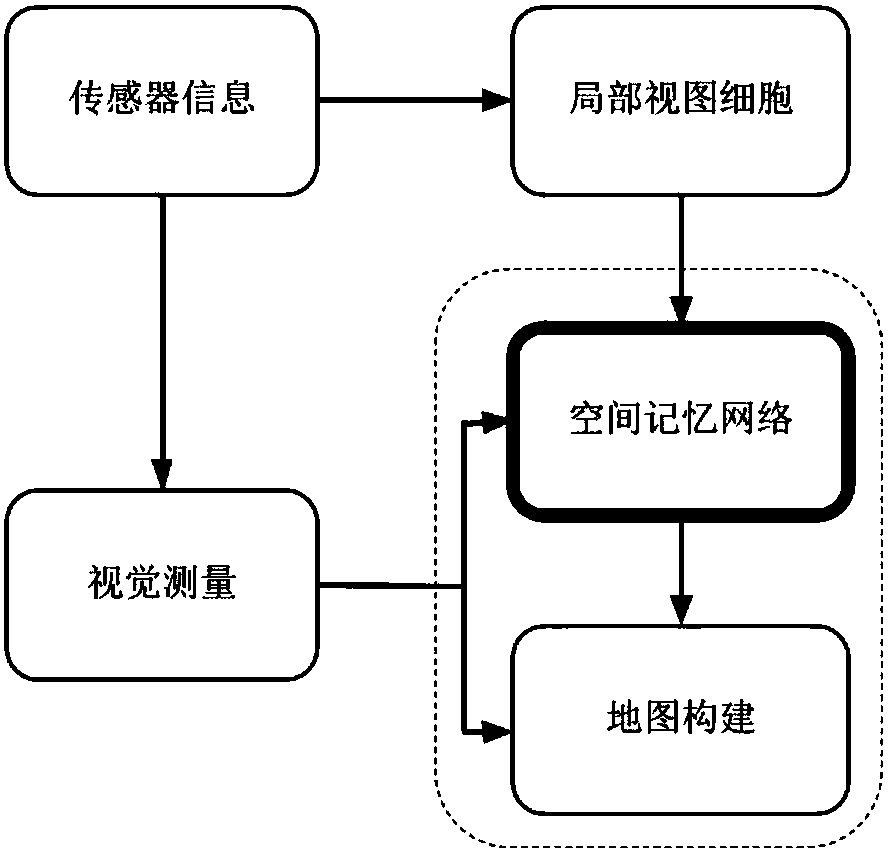
[0097] Such as figure 1 shown. The invention discloses a cognitive map construction method based on joint coding of space and motion. The invention belongs to the technical field of robot navigation. Considering the internal positioning system of the mammalian brain, the entorhinal cortex-hippocampus neural circuit, using the spatial navigation coding properties of place cells, head orientation cells, grid cells, and speed cells, a complex continuous attractor neural network model-spatial memory A network that simultaneously encodes the spatial and motion characteristics of animals, and performs path integration for angular and linear velocities. In this network, the asymmetric connection weights between neurons can generate the inherent activity peaks of the system that can move spontaneously. Once there is a velocity input, the attractor network can robustly integrat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More