

Rapid Kalman online detection filtering method based on parameter dynamic adjustment
A dynamic adjustment and parameter technology, applied in complex mathematical operations and other directions, can solve the problems of timeliness, such as space for optimization, incompetence in online detection, and ignoring the direct impact of parameter settings, to overcome time overhead, reduce computational complexity, and filter effects. excellent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with examples.
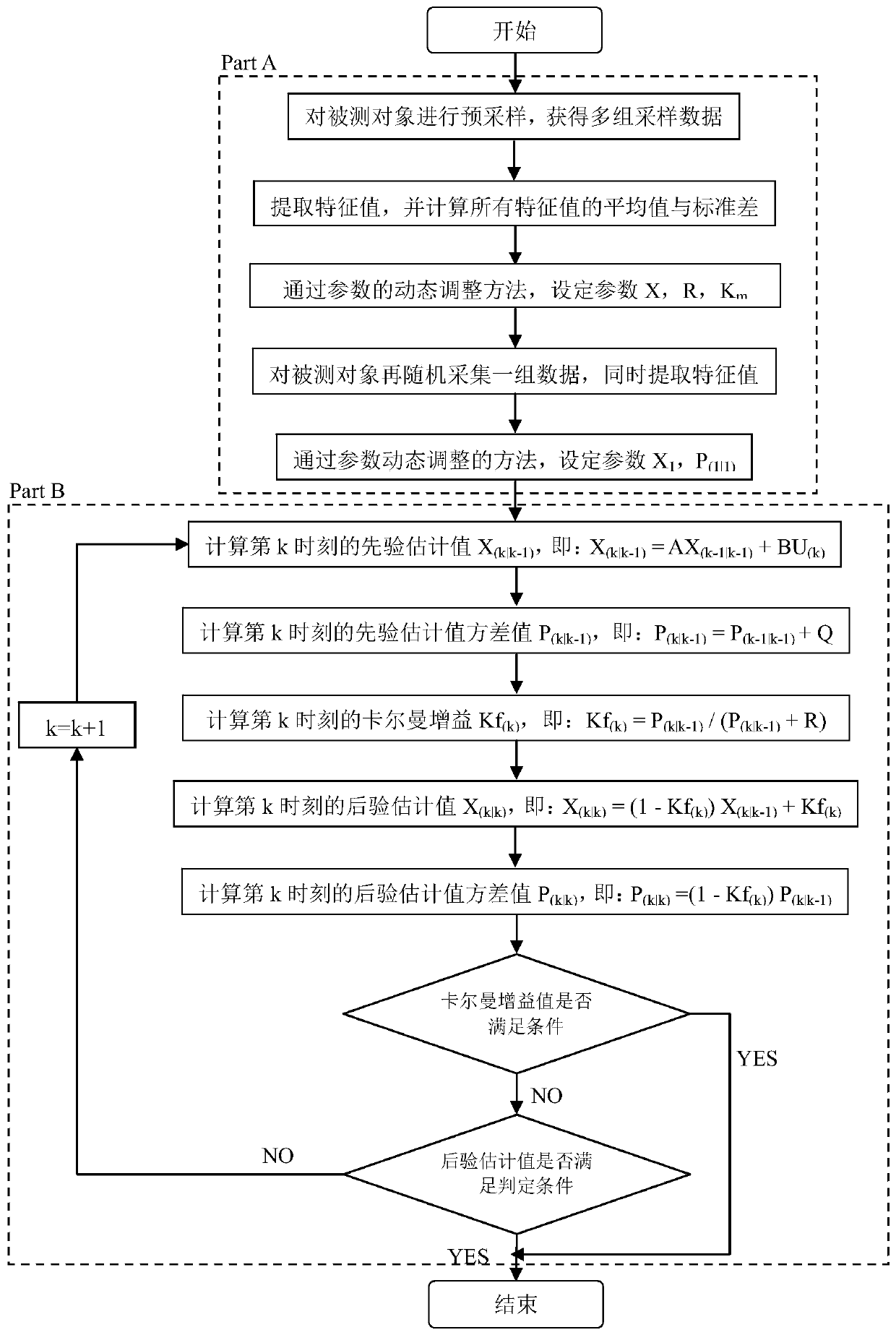
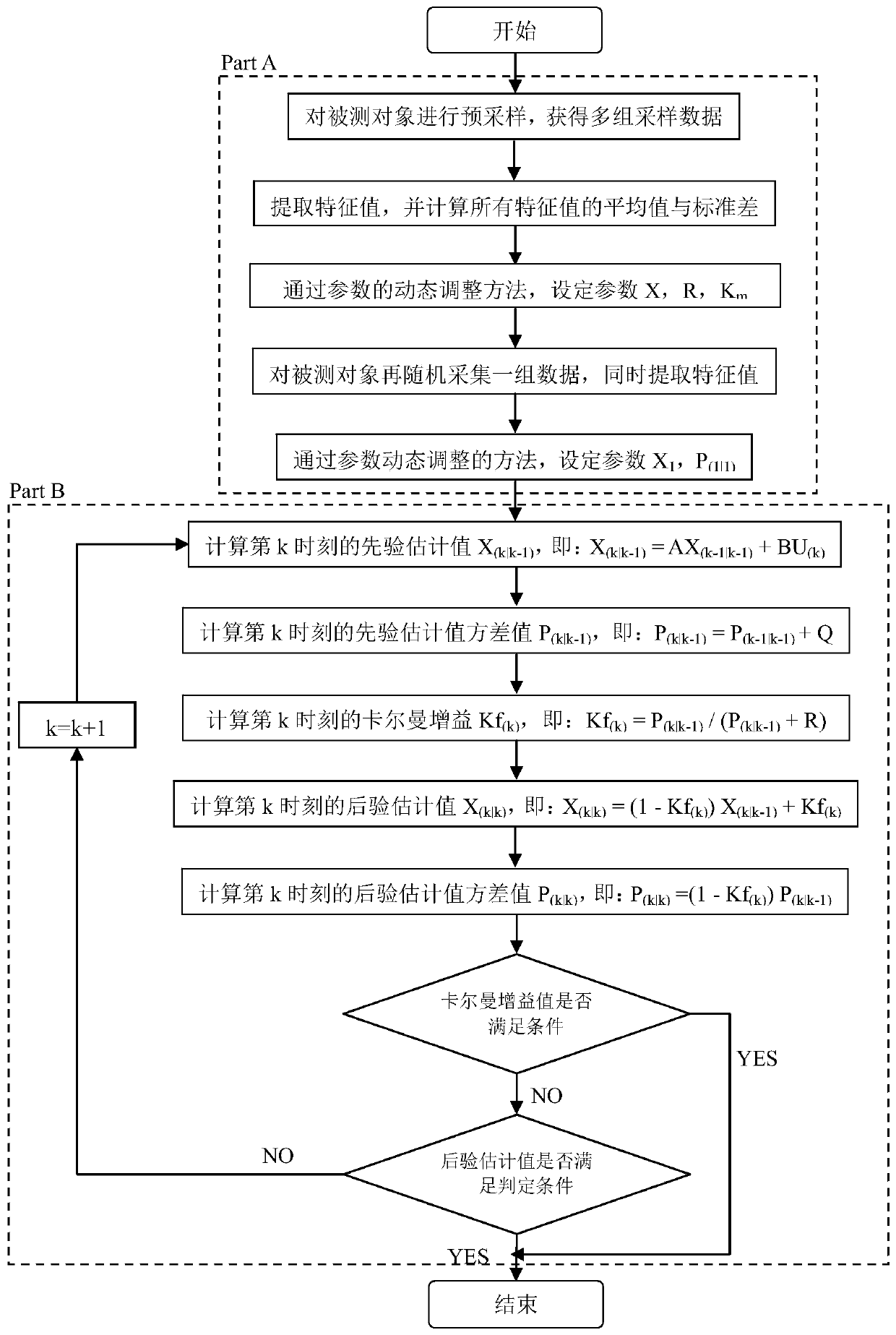
[0057] like figure 1 As shown, a fast Kalman online detection and filtering method based on parameter dynamic adjustment provided by the present invention mainly includes two parts. Part A represents the dynamic adjustment of the target value of the filtered data according to the detection environment, the measurement variance of the filtered data, and the lower limit threshold of the Kalman gain. , the initial estimate, and the initial estimate variance. Part B represents the online detection and filtering process using Kalman filtering to modify the recursive operation. The method provided by the invention can be widely applied to time series analysis in the field of automatic detection.
[0058] Specifically, a fast Kalman online detection and filtering method based on parameter dynamic adjustment in the present invention includes the following steps:
[0059] S1: Place the objec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More