

Auxiliary-supporting lower limb exoskeleton robot
An exoskeleton robot and auxiliary support technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inconvenient power storage, high cost, and complicated control, and achieve easy operation, lighten the burden on the body, and reduce cumbersome operations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
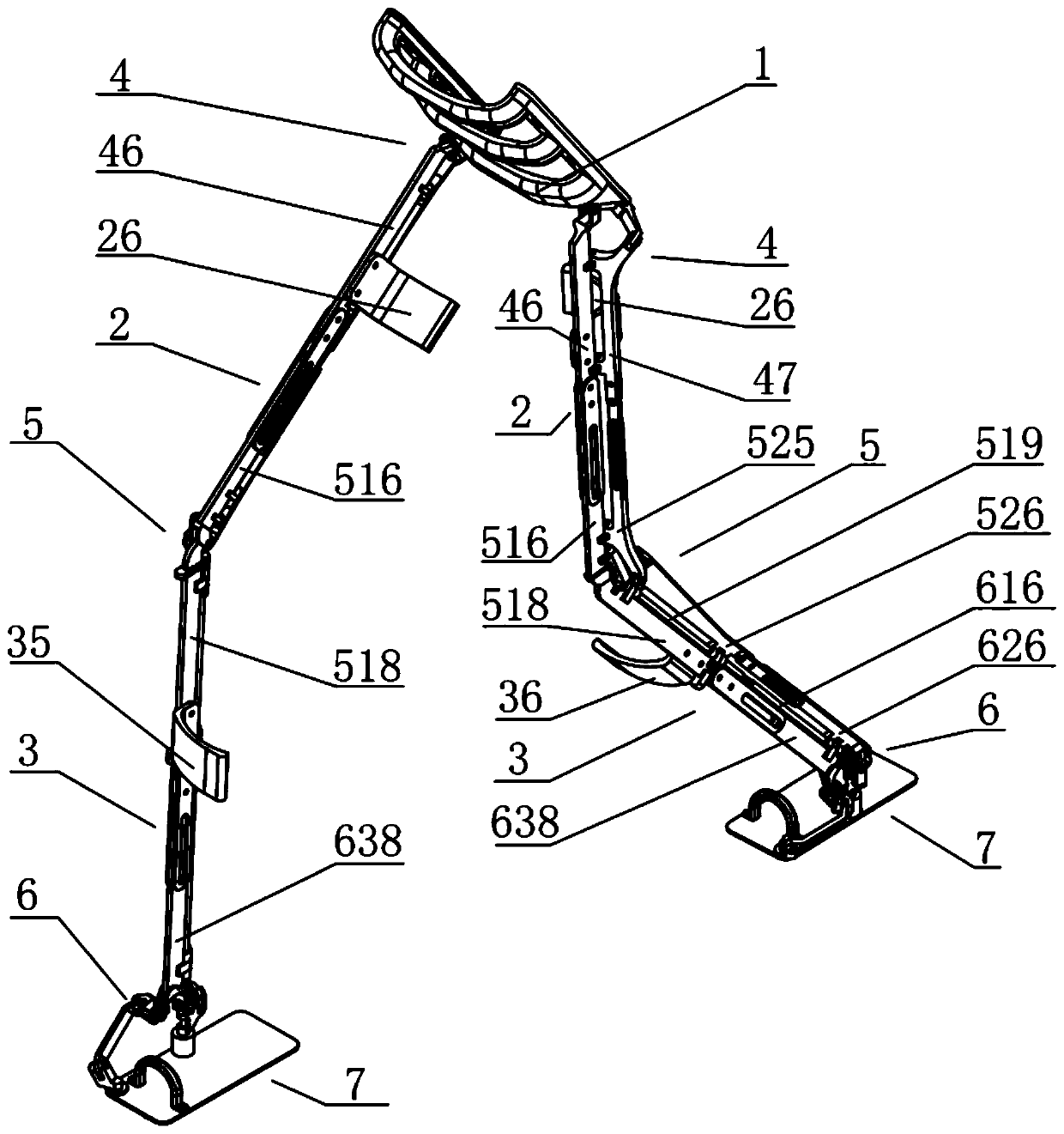
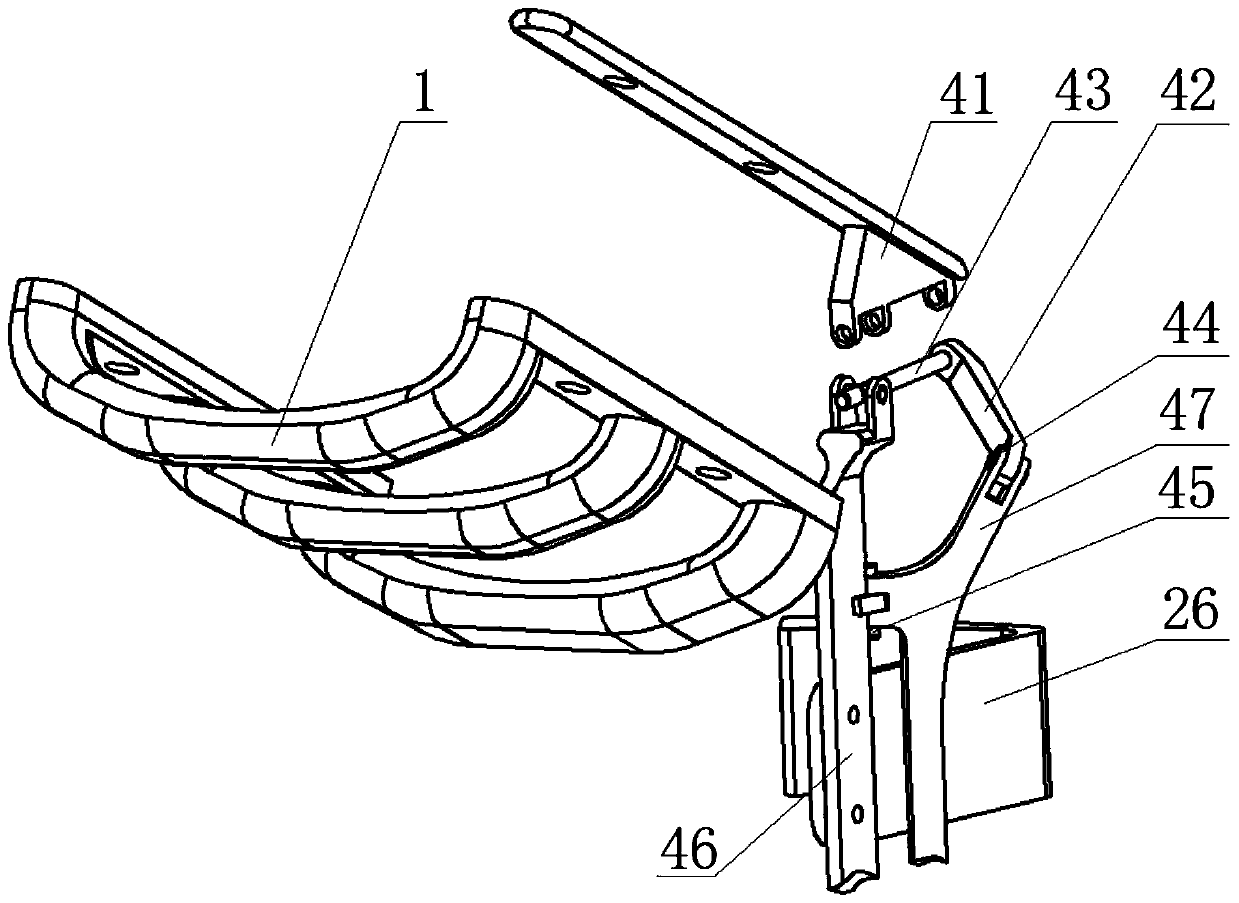
[0041] The present invention provides an auxiliary support lower limb exoskeleton robot (exoskeleton for short, see Figure 1-8 ), which is characterized in that the exoskeleton includes a waist and abdomen leaning board 1, a left leg and a right leg; the left leg and the right leg have the same structure, and are symmetrically installed on the lower part of the waist and abdomen leaning board 1; the left leg includes a thigh supporting part 2. Calf support part 3, hip joint part 4, knee joint part 5, ankle joint part 6 and plantar locking device 7;
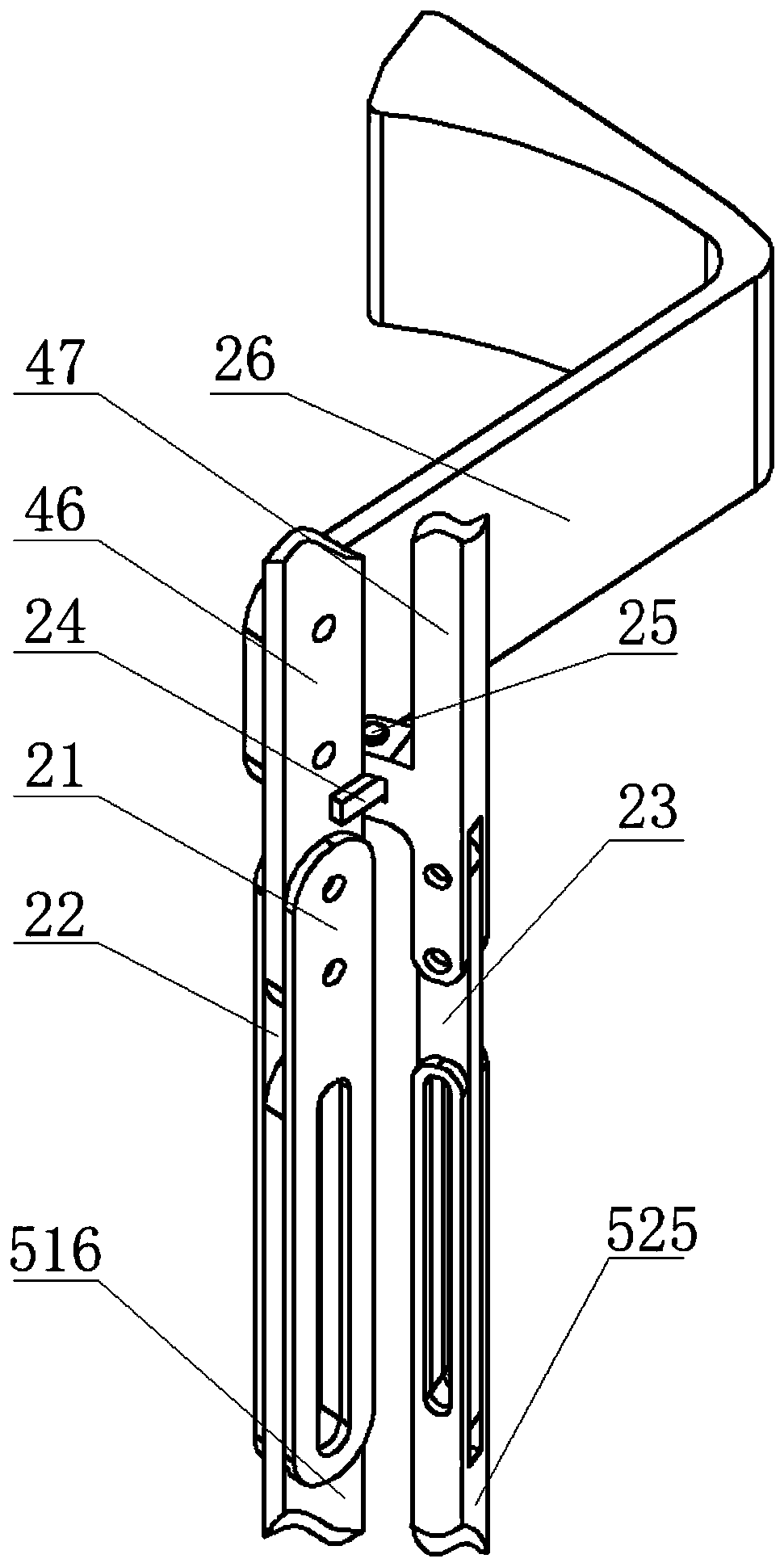
[0042] The thigh support part 2 includes a thigh rod 21, a thigh rod splint 22, a hip joint primary transmission link 23, a hip joint primary transmission link bushing 24, a hip joint primary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More