

A robot suitable for underwater cruising and seabed crawling and its control method
A robot and control unit technology, applied in transportation and packaging, underwater operation equipment, ships, etc., can solve the problems of complex seabed terrain, harsh environment, difficult to recover, etc., and achieve accurate mobile operation ability and stability against ocean currents for large-scale activities Ability, strong environmental adaptability and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
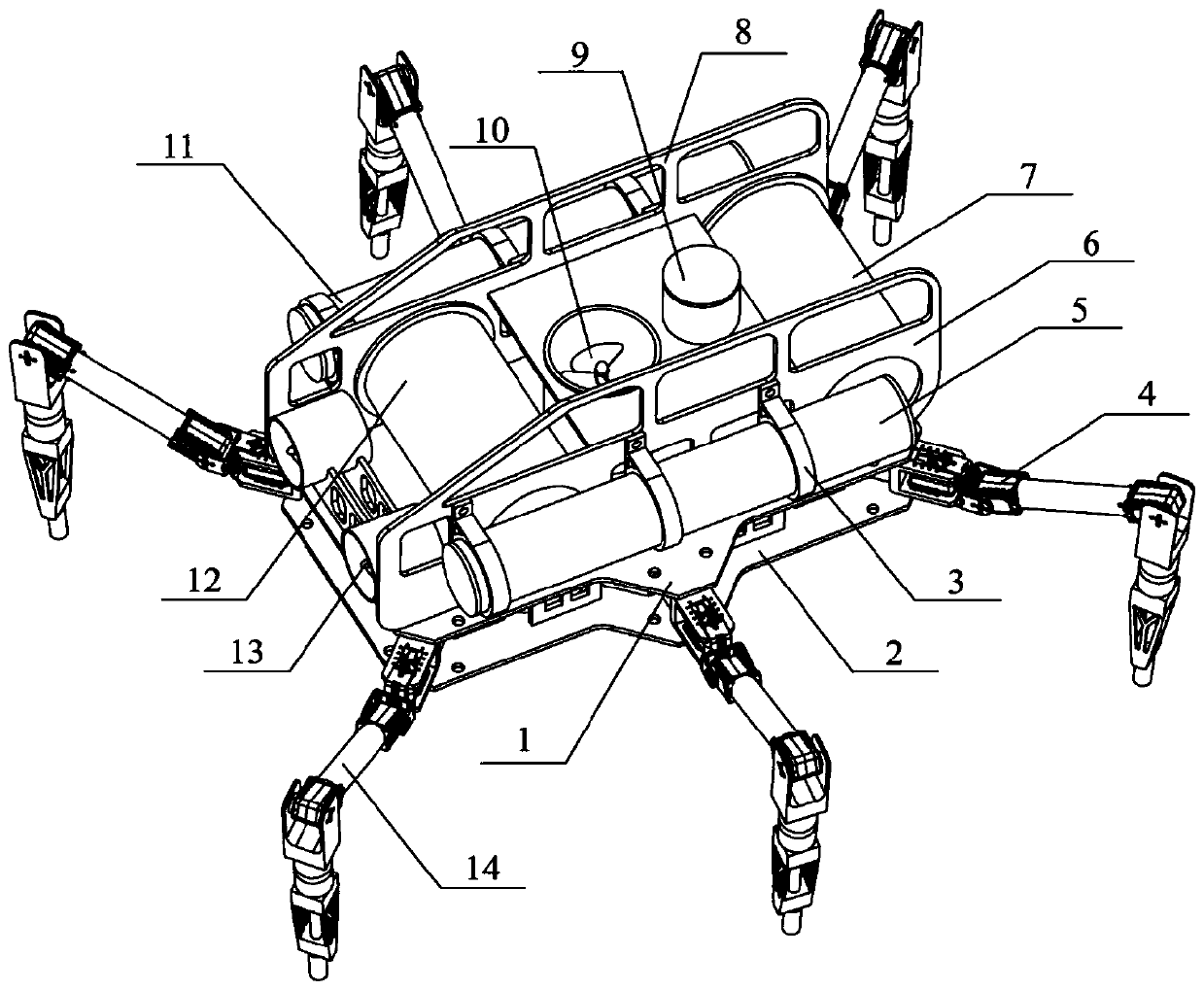
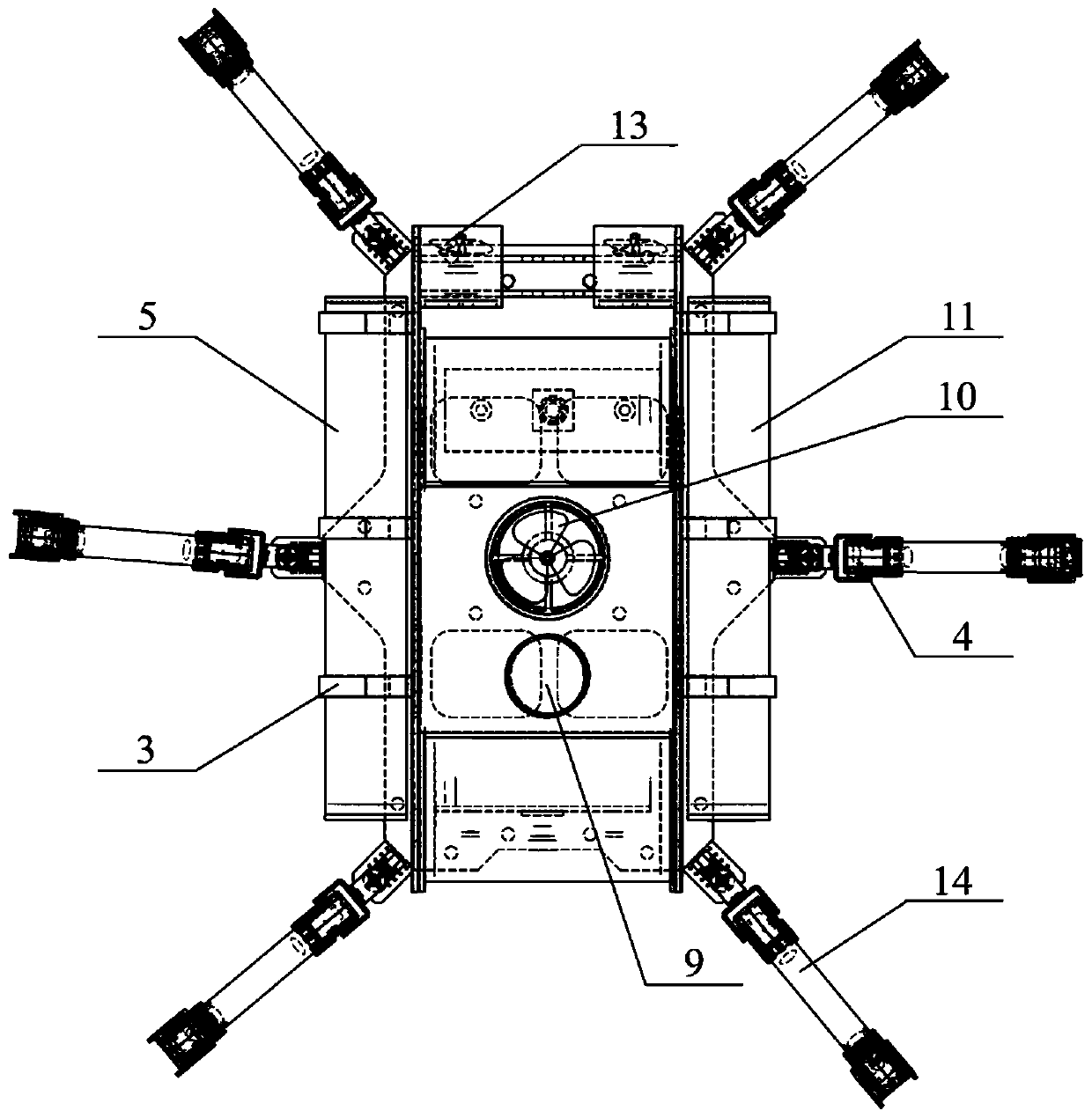
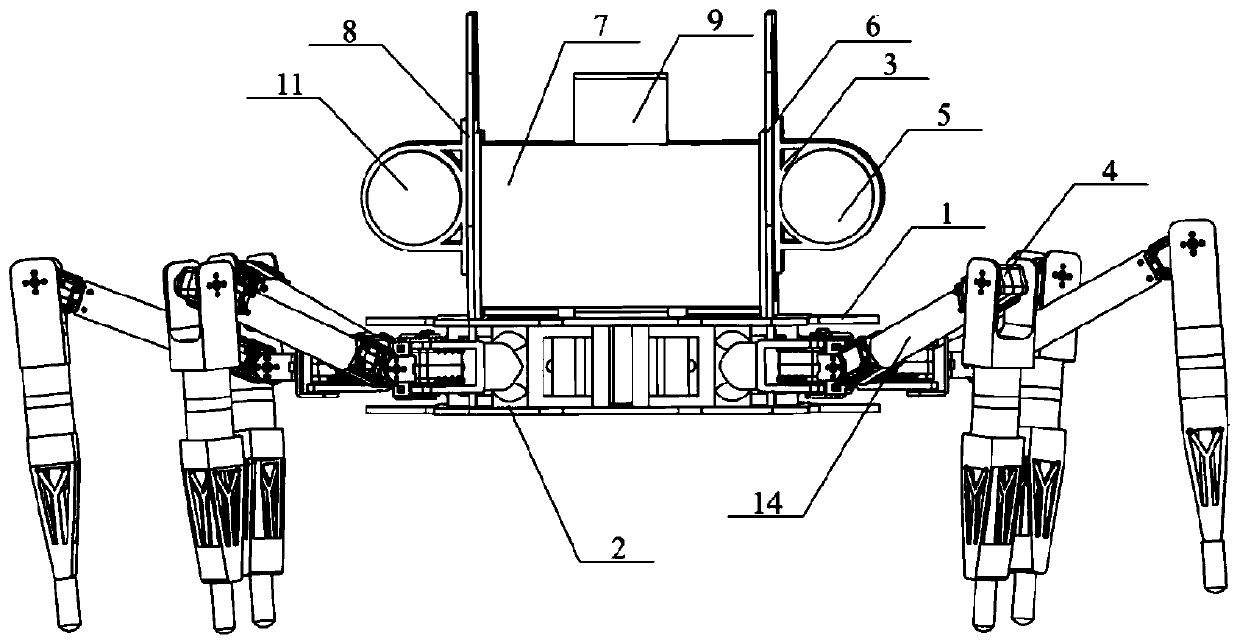
[0057] like Figure 1 to Figure 13 As shown, the embodiment of the present invention provides a robot suitable for water cruising and seabed crawling, including a water cruising module and a seabed crawling module. Among them, the water cruising module includes a left wing 8, a right wing 6, a front horizontal airtight cabin 7, a rear horizontal airtight cabin 12, an electronic cabin 9, a vertical thruster 10, a left longitudinal suction and discharge cabin 11, a right longitudinal suction Drainage compartment 5 and horizontal differential propeller 13.
[0058] like figure 1 , image 3 and Figure 4 As shown, the left wing board 8 and the right side wing board 6 of the water cruise module are parallel and oppositely arranged. The front horizontal airtight cabin 7 and the rear horizontal airtight cabin 12 are arranged horizontally, and are arranged at intervals between the left side panel 8 and the right side panel 6. The front horizontal box 7 and the rear horizontal box ...
Embodiment 2
[0078] The present invention also provides a robot system suitable for cruising in water and crawling on the bottom of the sea, such as Figure 14 As shown, the system includes a host computer and at least one robot suitable for water cruising and seabed crawling described in any one of the above-mentioned embodiments.
[0079] Among them, the upper computer includes input devices (such as keyboards, mice, joysticks, etc.) and output devices (such as monitors, etc.), the upper computer is connected with the control unit of the robot through an umbilical cable, and is used for manipulator input by the input device according to the user. The commands generate robot operation instructions and send them to the control unit of the robot, and the control unit is used to generate corresponding control instructions according to the received robot operation instructions. That is, the user can input operator commands through the host computer to control the underwater robot to execute v...
Embodiment 3
[0084] The present invention also provides a control method for a robot suitable for underwater cruising and seabed crawling, using the above-mentioned robot system suitable for water cruising and seabed crawling, including underwater cruising mode and seabed crawling mode.
[0085] Among them, the underwater cruise mode includes:
[0086] S1. The robot acquires external environment information and feeds back to the host computer, and the host computer receives and displays the external environment information of the robot in real time. The external environment change information here includes the underwater video captured by the underwater camera (i.e., the horizontal direction camera 19, the vertical direction camera 20) and / or the underwater sensing information obtained by the underwater sensing device, such as depth, position, etc. .
[0087] S2. The user controls the floating movement of the robot through the host computer according to the external environment informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More