

An Adaptive Sliding Mode Control Method for Reaction Wheel Balancing Bicycle Robot
A bicycle robot and self-adaptive sliding mode technology, applied in the directions of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult to adapt to the parameter bicycle robot, weak adaptability of system parameters, and unsatisfactory robustness. , to achieve the effect of strong adaptability, strong interference adaptability, robustness and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
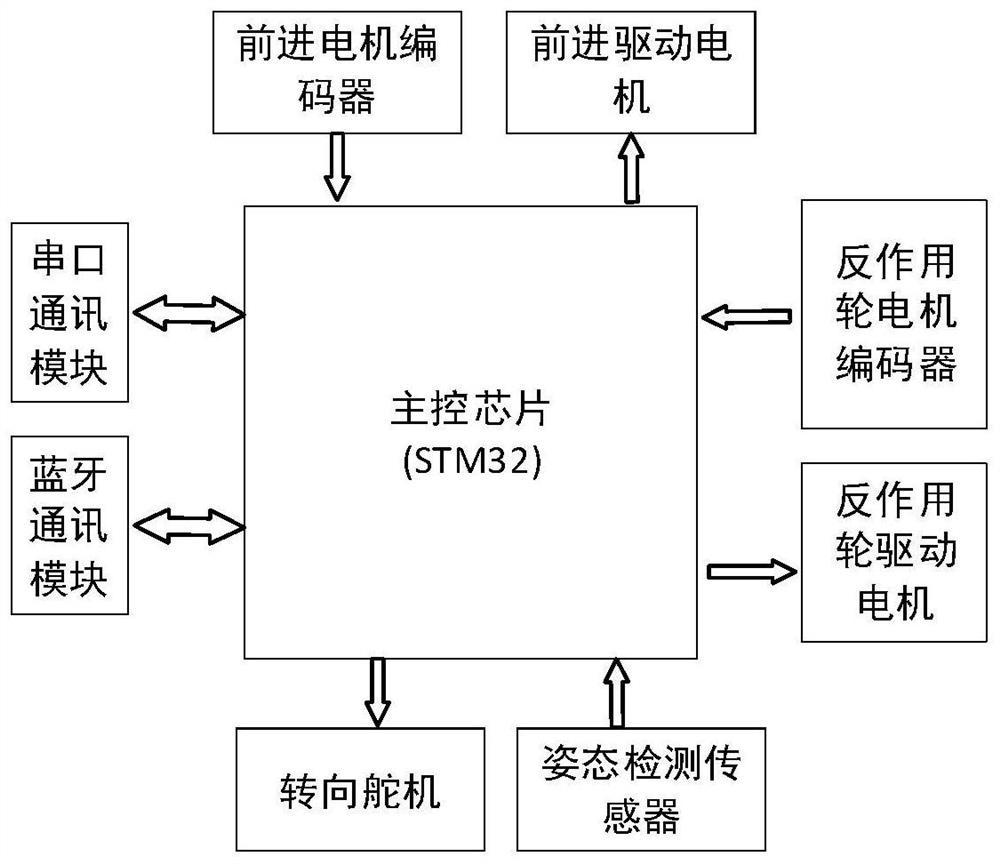
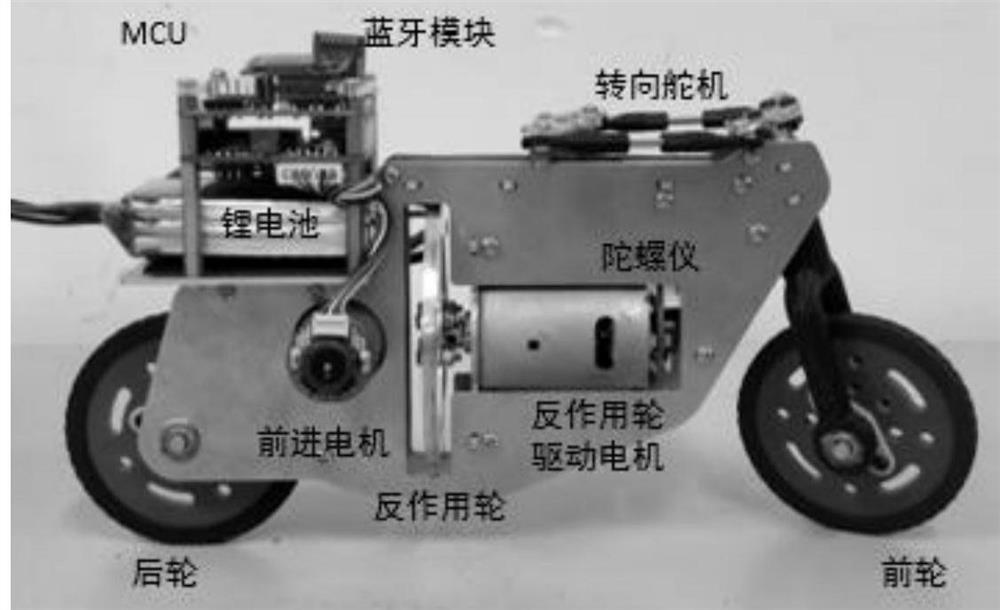
[0033] see figure 1 with 2 The system structure model of the reaction wheel balancing bicycle robot of the present invention is shown. in, figure 1 It is a block diagram of the control system structure. It can be seen that the control system of the reaction wheel balance bicycle robot is mainly composed of the main control chip, the communication subsystem, the steering subsystem, the forward subsystem and the balance subsystem. The communication subsystem includes a serial port module for communicating with a computer and a Bluetooth module for communicating with a mobile APP. Both the forward subsystem and the balance subsystem include speed encoders and motors, and the balance subsystem also includes attitude detection sensors. figure 2 A robot model of a reaction wheel balancing bicycle is shown. Its composition consists of a body of steel structure. A reaction wheel for balance and a motor driven by it are installed in the middle of the vehicle body. The upper part ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More