

Variable stiffness cavity dividing soft manipulator using paper folding mechanism
A manipulator and variable stiffness technology, applied in the field of robotics, can solve the problems of finger bending angle, small bending range, poor grasping stability, large reaction force, etc., and achieve the effects of simple driving control, large grasping force, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] Embodiment 1: Soft finger
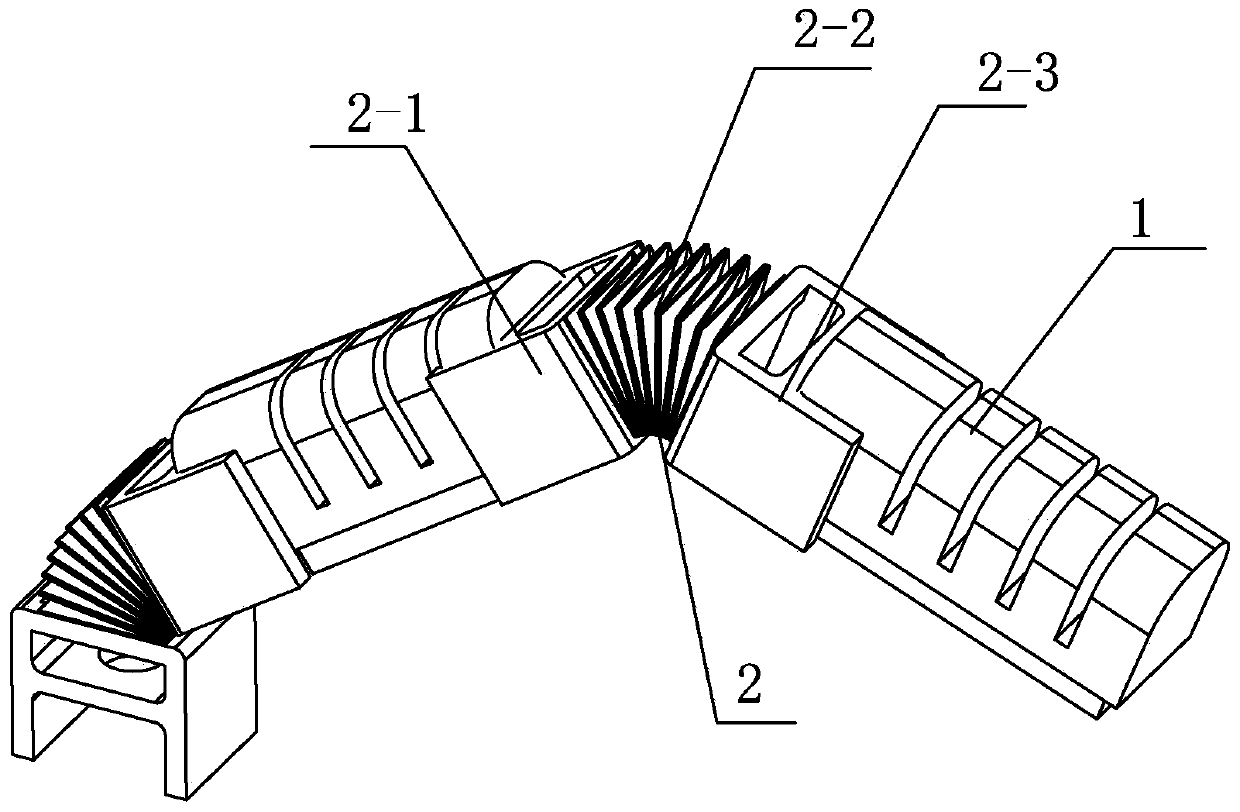
[0030] The schematic diagram of the soft finger of the present invention is as figure 1 As shown, at least one set of pneumatic bending modules 1 and origami connection mechanism 2 are included. Each of the origami connecting mechanisms 2 includes an origami telescopic module 2-2 and two connectors 2-1, 2-3, and the two connectors 2-1, 2-3 are respectively connected to the origami The two ends of telescopic module 2-2. The function of the connector is to realize the transitional connection between the pneumatic bending module and the origami telescopic module or other supporting mechanisms. The number of pneumatic bending modules 1 is determined according to the size of the items to be grasped, and can be 1-3. Correspondingly, the number of origami connection mechanisms 2 is equal to the number of pneumatic bending modules 1 . When there is one pneumatic bending module 1, the connecting piece 2-3 at one end is connected to the pneumatic b...
Embodiment 2
[0035] Embodiment 2: soft body hand
[0036] The structural schematic diagram of the variable stiffness sub-cavity soft manipulator applying the origami mechanism of the present invention is as follows Figure 6 As shown, it includes a base 3, a support mechanism 4 and soft fingers. Wherein, the part of the soft finger is the same as that in Embodiment 1, and the number of the soft finger is determined according to the needs of use, and can be 1-5. For a schematic illustration of a soft finger, see Figure 1-Figure 5 As shown, the soft finger includes at least one set of pneumatic bending modules 1 and an origami connection mechanism 2 . Each of the origami connecting mechanisms 2 includes an origami telescopic module 2-2 and two connectors 2-1, 2-3, and the two connectors 2-1, 2-3 are installed on the origami respectively. The two ends of telescopic module 2-2. When there is one pneumatic bending module 1 , the connecting piece 2 - 3 at one end is connected to the pneumat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More