

Similar round stepped type soft hand paw
A soft-body gripper, circular step technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of reducing clamping stability, stress concentration on the gas chamber wall, stress concentration, etc., to improve rigidity and improve clamping ability, the effect of good structural flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
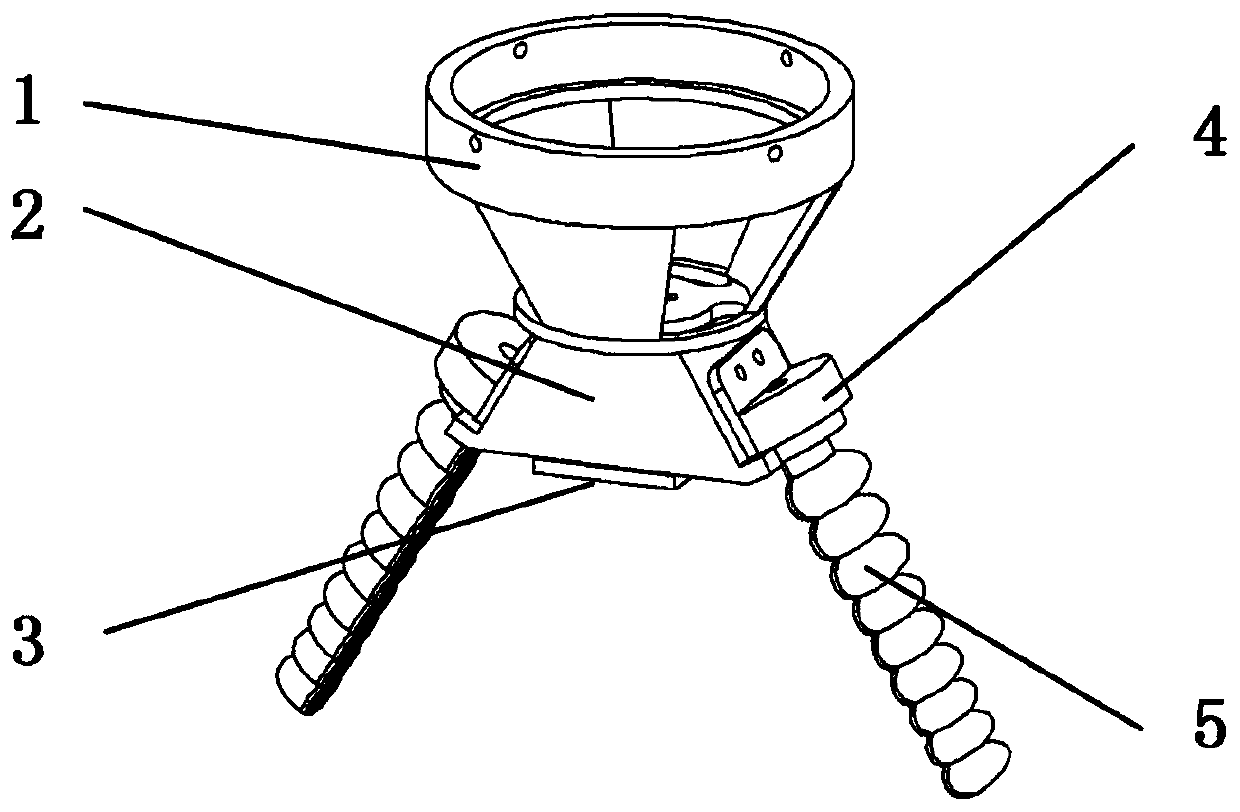
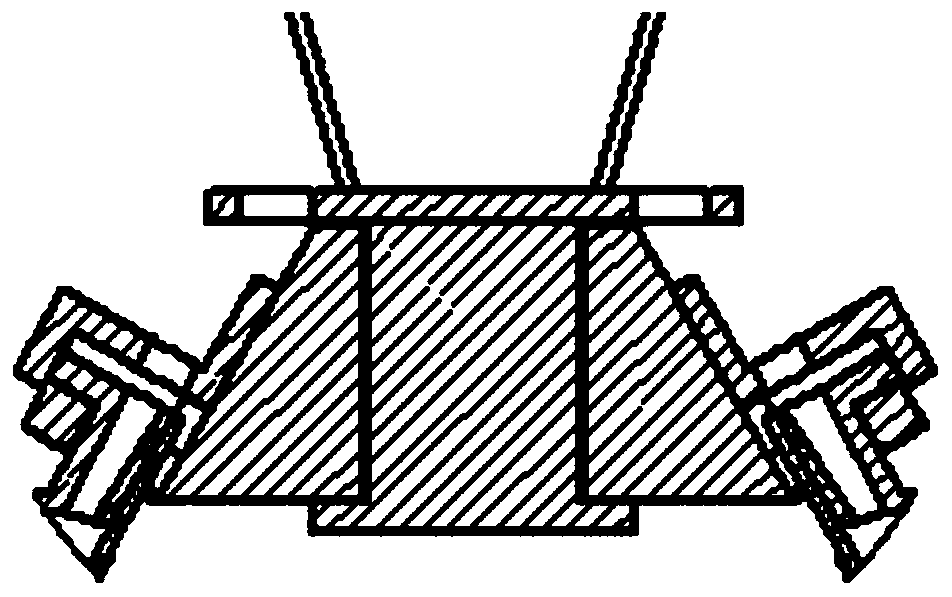
[0038] Such as figure 1 As shown, during implementation, the trachea is inserted into the air inlet of the soft actuator 5 by the finger plate 4 to realize air supply to the soft actuator. By controlling the air pressure inside the soft actuator 5, the bending deformation in the soft actuator is realized.
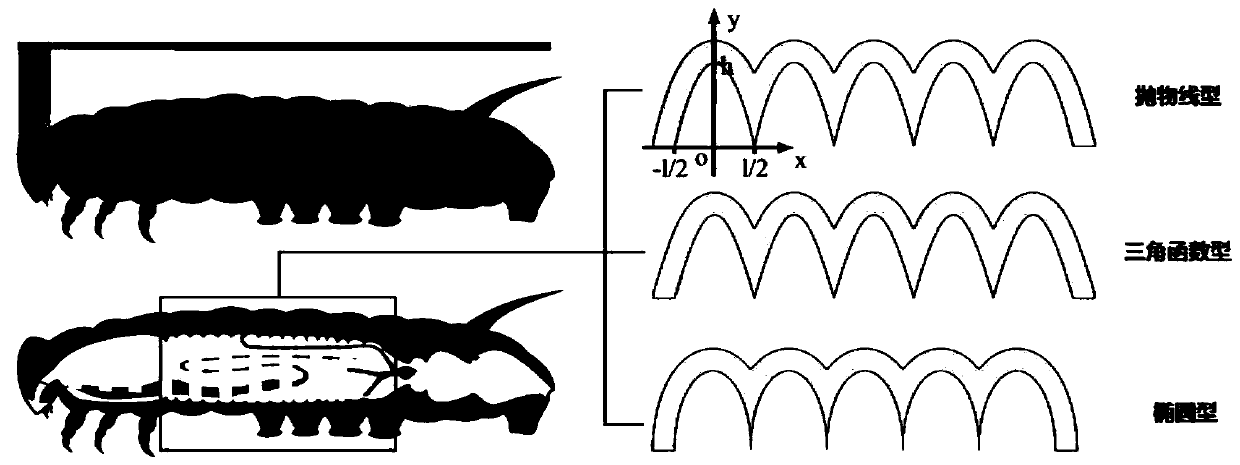
[0039] The air chamber structure of the soft actuator is calculated in equal proportions according to the bionic structure. The ratio of the maximum height h of the air chamber to the lateral range l of the air chamber is:
[0040]
[0041] Design the inner wall curves of three kinds of gas as follows:
[0042]
[0043] In the formula, l represents the lateral range of a single air chamber, h represents the maximum height of the air chamber, if l=10mm, then h=10.5mm. x is the lateral range of the air chamber, in mm, That is, the width of the air chamber is l; y is the longitudinal range of the air chamber, in mm, y∈[0, h], that is, the maximum height of the air ch...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More