An unmanned splicing platform based on group control
An unmanned and splicing technology, which is applied in the direction of buildings, building types, buildings, etc. where cars are parked, can solve problems such as narrow driving lanes, troublesome driving, unclear responsibilities of parking lots and vehicles, etc., and achieve a reduction in controller The effect of reducing the amount of computation, improving space utilization, and saving computing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
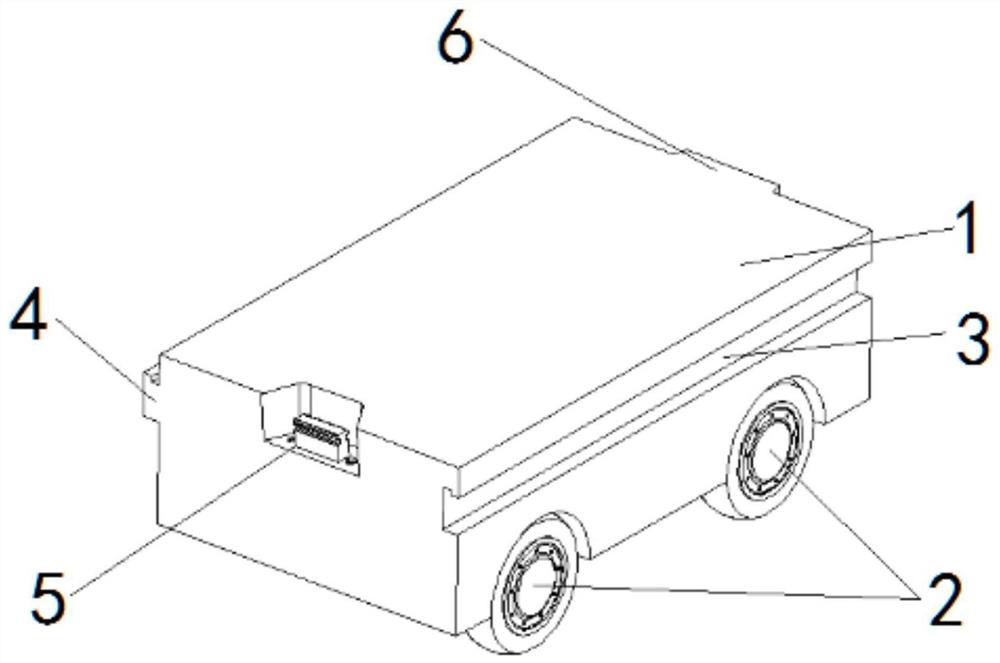
[0029] attached by figure 1 As shown: the carrying platform includes a carrying platform main body 1 as an automatic driving chassis, four independently operated in-wheel motor drive wheels 2 are arranged under the carrying platform main body 1, and one side of the carrying platform main body 1 has a horizontal The through-type transverse connecting groove 3 provided, the other side of the carrying platform main body 1 has a transverse connecting protrusion 4 corresponding to the transverse connecting groove 3, and the front of the carrying platform main body 1 has a longitudinal connecting concave Groove 5, the rear of the carrying platform main body 1 has a longitudinal connection boss 6 corresponding to the longitudinal connection groove 5.
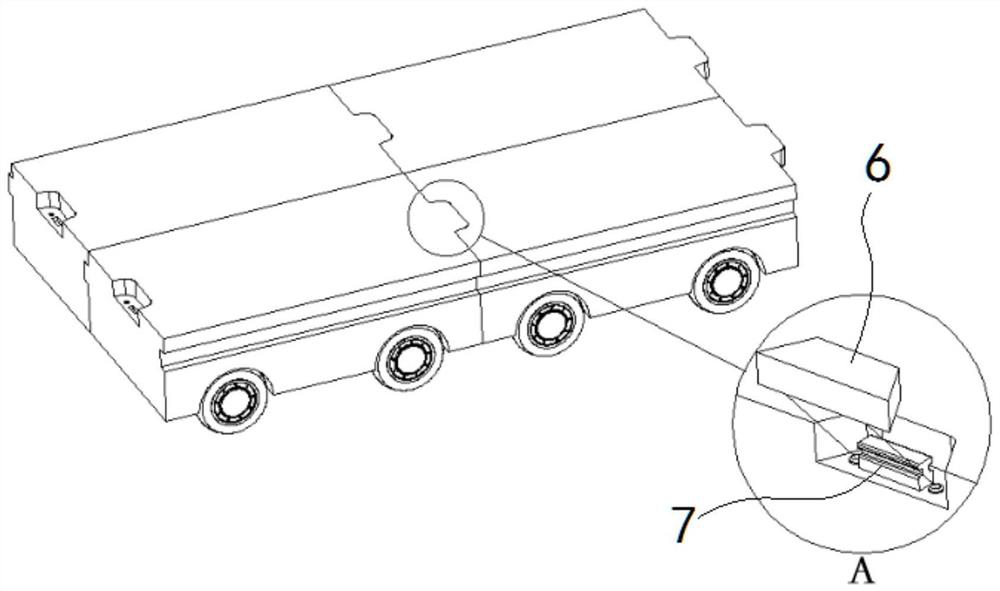
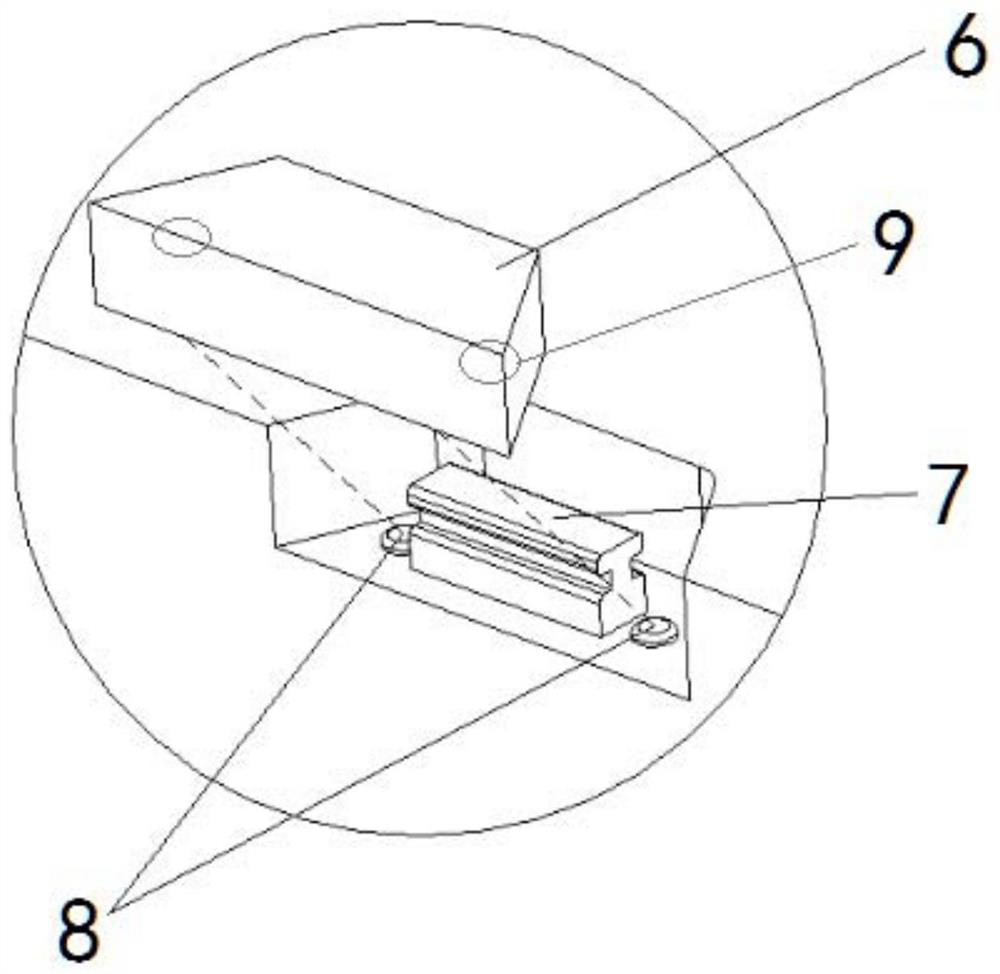
[0030] attached by figure 2 As shown: a plurality of said loading platform main bodies 1 can be spliced horizontally and vertically through the horizontal connection grooves 3 and the horizontal connection protrusions 4, the longit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com