

Control method of unmanned vehicle and unmanned vehicle
A technology of unmanned vehicles and control methods, which is applied in the field of unmanned vehicles, can solve the problems of no vehicle speed, throttle planning, and unguaranteed reliability and safety of unmanned vehicles, so as to improve reliability and safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] Please refer to figure 1 , Embodiment 1 of the present invention is:
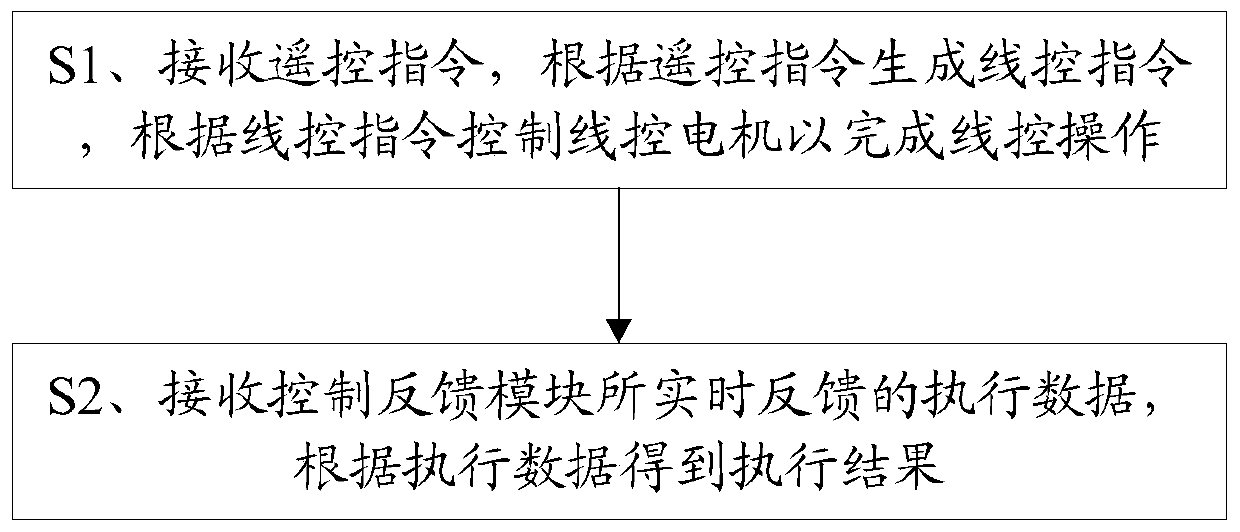
[0082] A control method for an unmanned vehicle, comprising the steps of:
[0083] S1. Receive the remote control command, generate the wire control command according to the remote control command, and control the wire control motor according to the wire control command to complete the wire control operation;
[0084] S2. Receive the execution data fed back by the control feedback module in real time, and obtain an execution result according to the execution data.
[0085] Wherein, step S1 includes:
[0086] Receive the remote brake command, generate the brake-by-wire command according to the remote brake command, and control the brake motor according to the brake-by-wire command to drive the pull rod connected to the brake pedal to complete the brake operation;
[0087] Receive the remote control steering command, generate the wire steering command according to the remote control steering command...
Embodiment 2
[0099] Please refer to figure 1 , the second embodiment of the present invention is:
[0100] A control method for an unmanned vehicle, on the basis of the first embodiment above, if it is tracking driving, the following steps are performed:
[0101] S3. Receive a track route composed of a set of track points, calculate the steering angle, driving speed, throttle amount, and brake amount according to the track route, and generate a dynamic adjustment command in real time.
[0102] Wherein, step S3 also includes:
[0103] Obtain the current vehicle speed information, generate and send the first instruction to change the output strength of the steering motor in real time according to the steering power curve, so as to control the steering motor to adjust the wheel steering angular velocity, and the wheel steering angular velocity in the steering power curve increases with the increase of the current vehicle speed information Decrease, for example, if the current vehicle speed ...
Embodiment 3
[0106] Please refer to figure 2 as well as image 3 , Embodiment three of the present invention is:
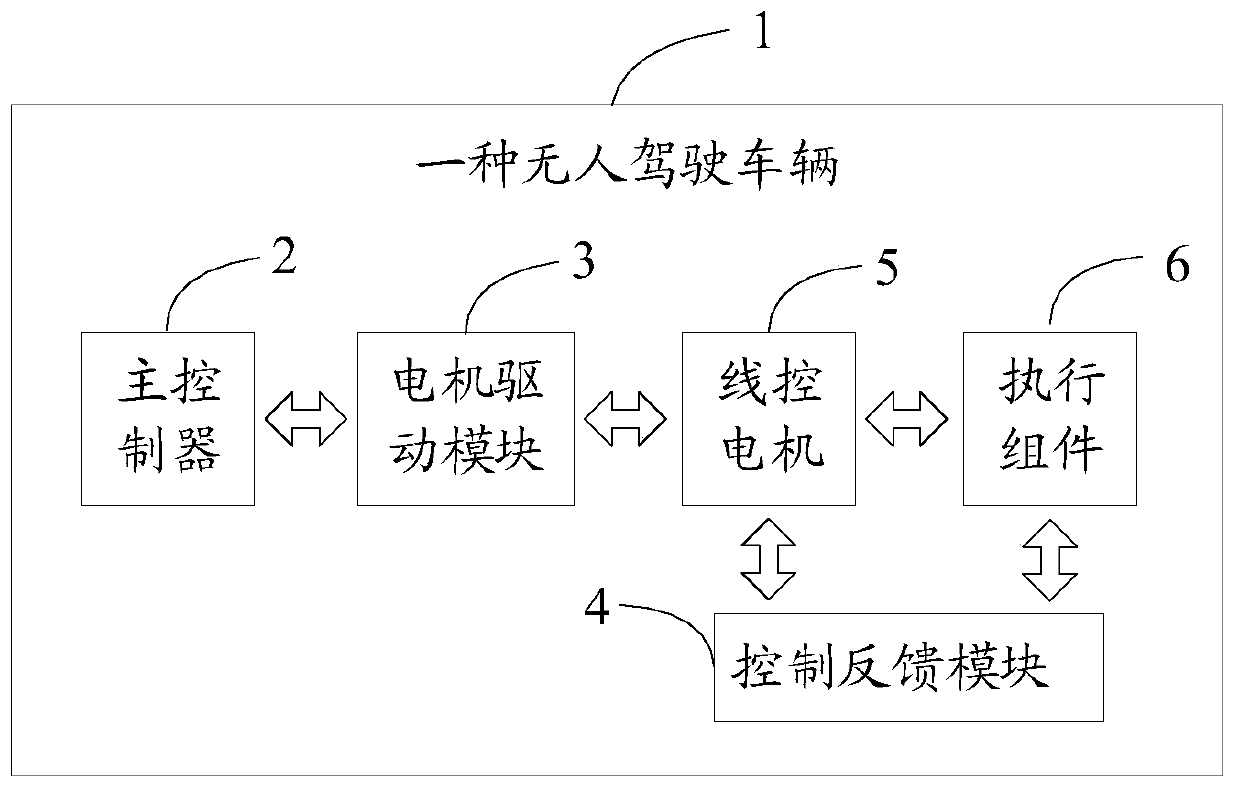
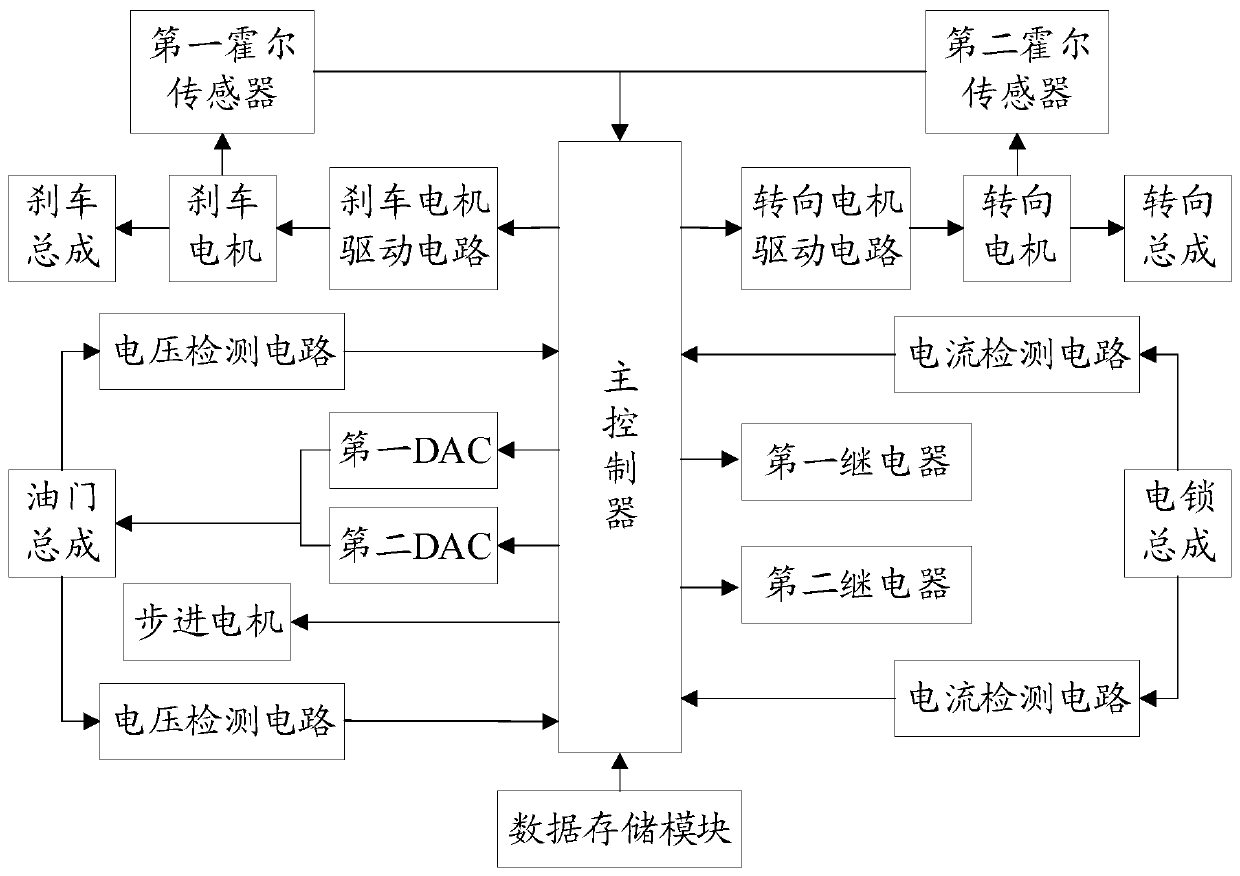
[0107] An unmanned vehicle 1, including an executive assembly 6, an engine, a storage battery and an independent power supply module, including a main controller 2, a motor drive module 3, a wire-controlled motor 5 and a control feedback module 4, and the main controller 2 passes through the motor drive module 3 is connected to the wire-controlled motor 5, the wire-controlled motor 5 is connected to the executive component 6, the control feedback module 4 is connected to the wire-controlled motor 5 or the control feedback module 4 is connected to the executive component 6; the engine is respectively connected to the electric lock assembly, the battery and the independent The power supply module is connected, the engine includes a fuel tank, and a fuel tank heater is installed inside the fuel tank, and the fuel tank heater is connected to an independent power supply module; t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More