

High-precision target identification and detection method under grid background
A detection method and high-precision technology, applied in the field of computer vision, can solve problems such as color interference, poor anti-sunlight performance, and inability to accurately calculate the distance between the UAV and the target landing net, and achieve the effect of high-precision calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0056] The invention provides a high-precision target recognition and detection method under a grid background, comprising the following steps:
[0057] Step 1: Design the target
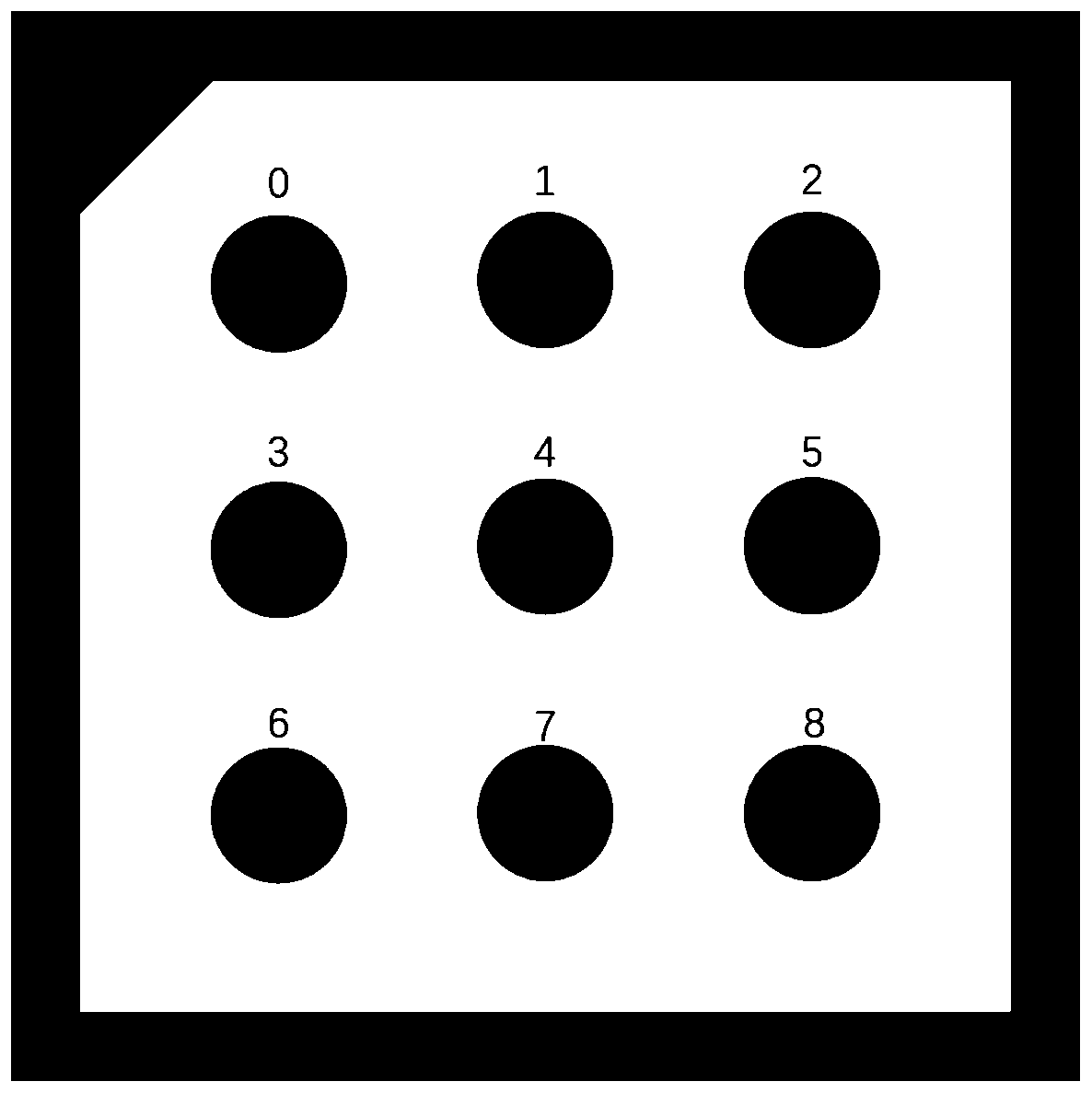
[0058] The target is a white bottom plate with one corner cut off; the bottom plate is provided with an icon array formed by regular arrangement of a plurality of identical icons; the size of the icons and the spacing between the icons are known. Icons are regular graphics such as circles, rectangles, hexagons or stars, and are black.
[0059] Among them, in order to improve the reliability of the contour extraction, a black frame is added around the base plate, which is more conducive to the extraction of the contour of the base plate.
[0060] Such as figure 1 As shown, the target parameters: the bottom plate is a white square with one corner missing, and the icon array is a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More