

Heading drift error closed-loop compensation method applied to communication-in-moving inertial navigation system
An inertial navigation system and heading drift technology, which is applied in the field of satellite communication and can solve the problems of satellite tracking accuracy damage of the antenna system in motion and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
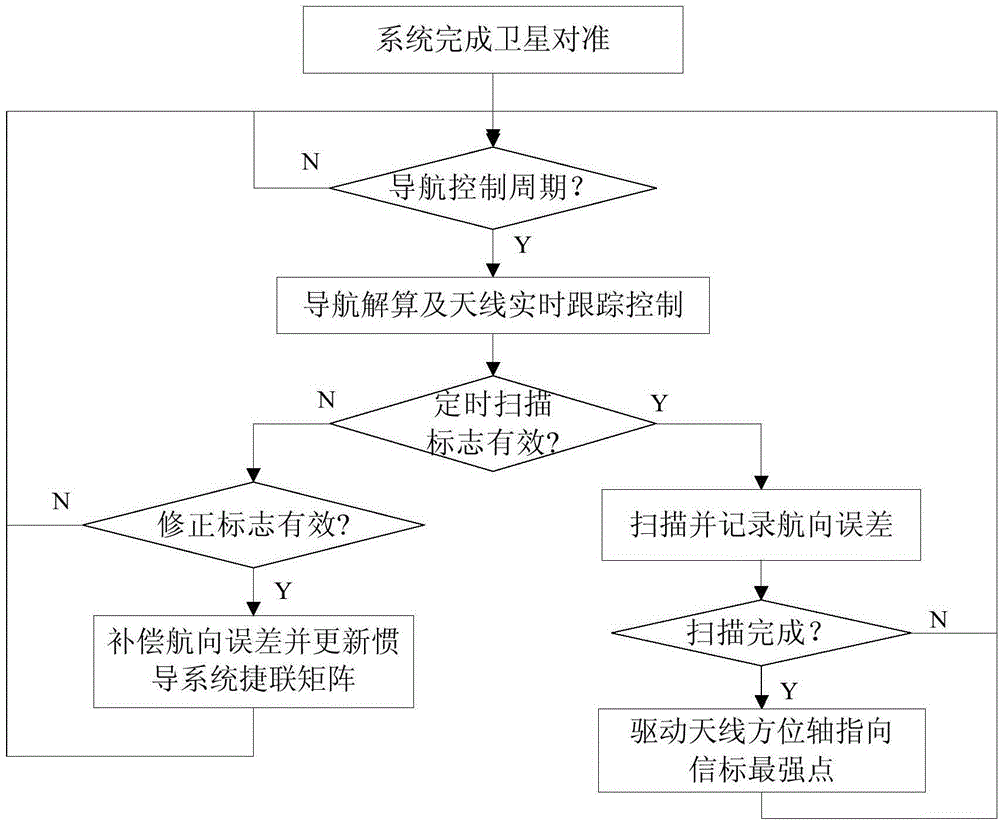
[0056] 1. Set the control navigation period counter M, heading timer SCANFLAG and compensation flag MODIFLAG, the initial value is 0, the preset maximum voltage value XBMAX=4.3V, the step size SAngle=0.01°, the total amount of unilateral scanning ASINGLE=200;
[0057] 2. Control the navigation period counter M and the heading timer SCANFLAG to start counting, when the navigation period counter M counts to 5ms, enter step (3);
[0058] 3. The inertial navigation system calculates the carrier's current pitch angle P=0.5°, roll angle R=0.5°, and heading angle Y=120.0°, then the antenna pitch angle fPitch=49.057437°, polarization angle fJihua=16.596453° and Antenna azimuth angle fYaw=9.373444°;
[0059] 4. Determine the heading timer SCANFLAG≥2min, if it is satisfied, then the antenna azimuth axis angle fYaw=fYaw+SAngle=9.373444°+0.01°=9.38344°, and drive the azimuth axis to rotate, at this time Sum=0.01°, SCnt=1, The real-time voltage value of the beacon read at the same time is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More