

Agile quadruped robot based on coaxial parallel mechanism
A quadruped robot, parallel technology, used in motor vehicles, transportation and packaging, etc., can solve the problems of inflexibility, lightness, limited rotation angle, and many motors, and achieve excellent power performance, high reliability, and leg rotation. big moment effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
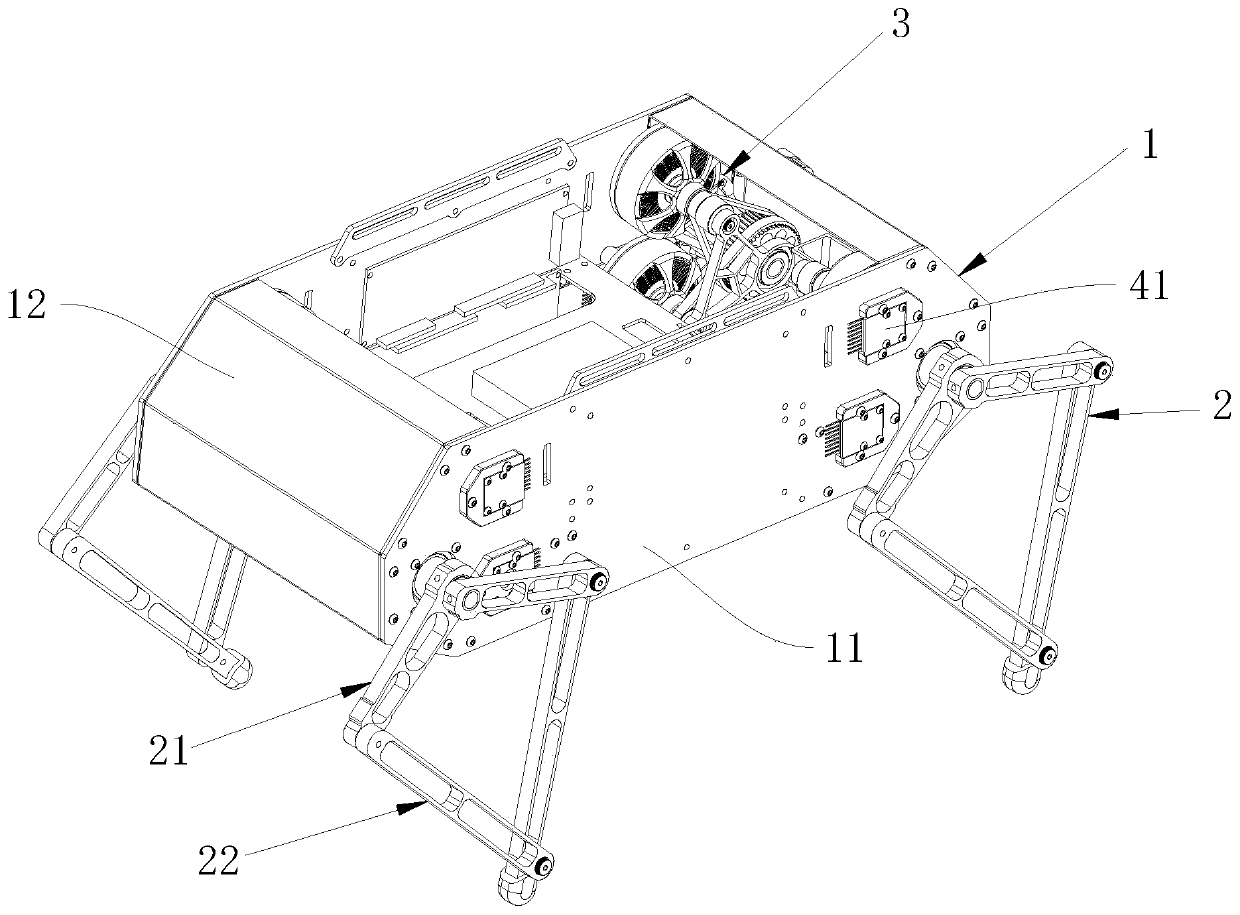
[0022] Such as figure 1 As shown, an agile quadruped robot based on a coaxial parallel mechanism includes a torso 1, four parallel legs 2, a dual-motor coaxial asynchronous transmission module 3 for driving the parallel legs 2 in the torso 1, and a control With communication module and power module. The control and communication module is mainly used to control the operation of the dual-motor coaxial asynchronous transmission module 3 and to control the gait of the whole legged robot, and the power module is used to supply power to the whole robot.
[0023] The torso 1 includes the torso side plates 11 arranged on both sides of the torso 1, the torso fixed bent plates 12 arranged at both ends of the torso 1 in the front and rear directions, and the torso fixed bottom plate arranged at the bottom of the torso 1, the torso side plates 11, the torso fixed bent plates 12 and The edges of the fixed base plate of the torso are connected and fixedly combined to form an integral tors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More