

Wind load equivalent calculation method for rotary obstacle crossing mode of inspection robot
A technology of inspection robot and calculation method, applied in the field of effective calculation, to achieve the effect of facilitating numerical simulation and programming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
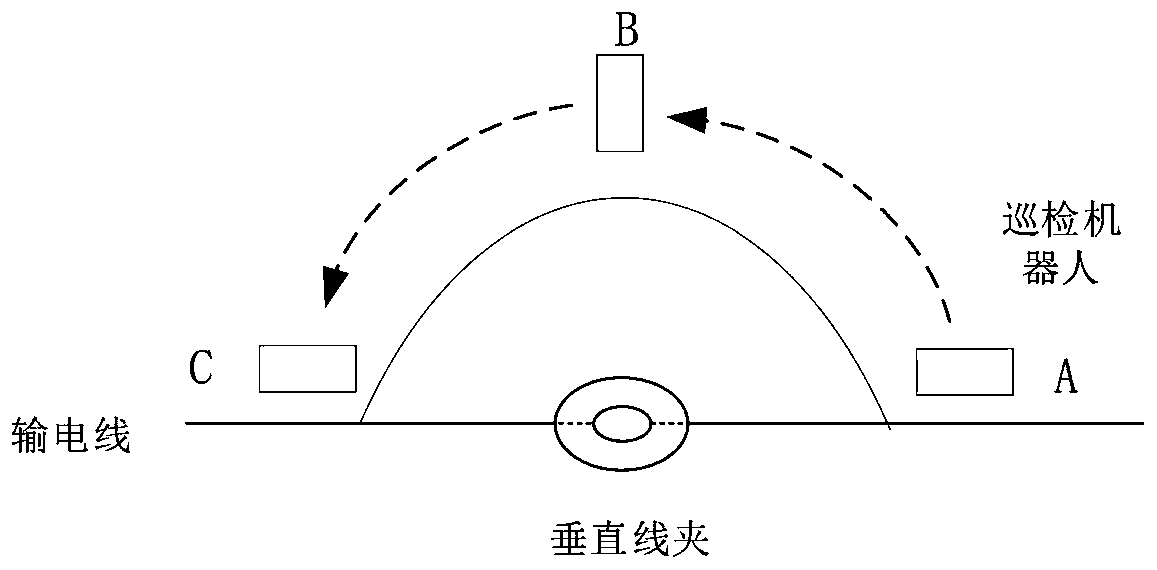
[0062] This embodiment provides an equivalent wind load calculation method for the inspection robot rotating obstacle mode, wherein the inspection robot used is the transmission line inspection robot in the patent application CN109193452A, specifically including the following steps:
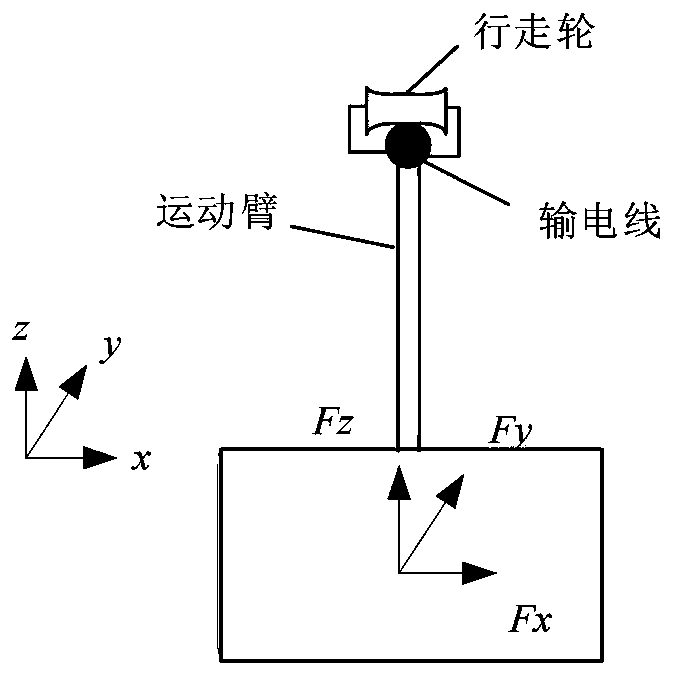
[0063] A1. Establish the wind load model of the inspection robot, specifically, such as figure 1 As shown, the wind load on the inspection robot is divided into transverse wind load Fx , Wind load F along the transmission line direction y and lift F z .
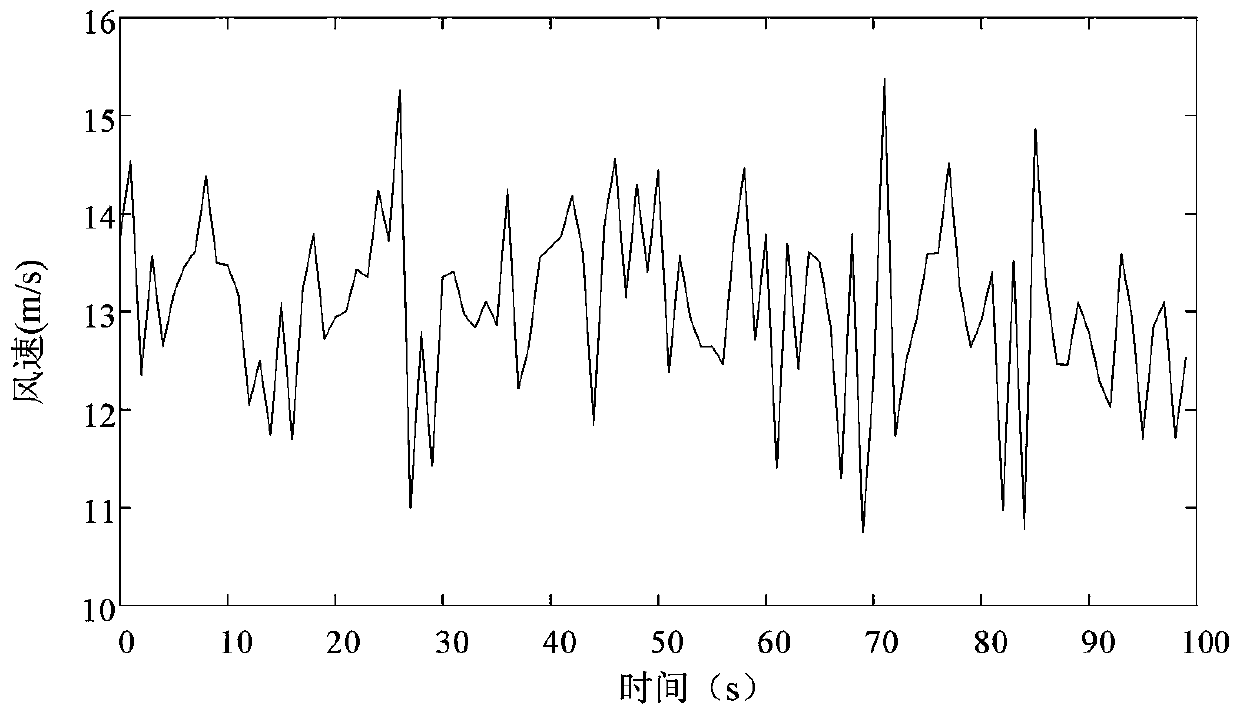
[0064] A2. According to the double-parameter Weibull distribution, a random wind speed model is established to obtain the time history of wind speed.
[0065] A21. The two-parameter Weibull distribution is a unimodal positivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More