

A positioning system and positioning method based on multi-sensor data fusion
A data fusion, multi-sensor technology, applied in the field of positioning systems, can solve the problems of increased cost of positioning systems and accumulation of positioning errors, and achieve the effects of reducing inaccurate positioning, reducing system errors, and enhancing adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with the accompanying drawings.
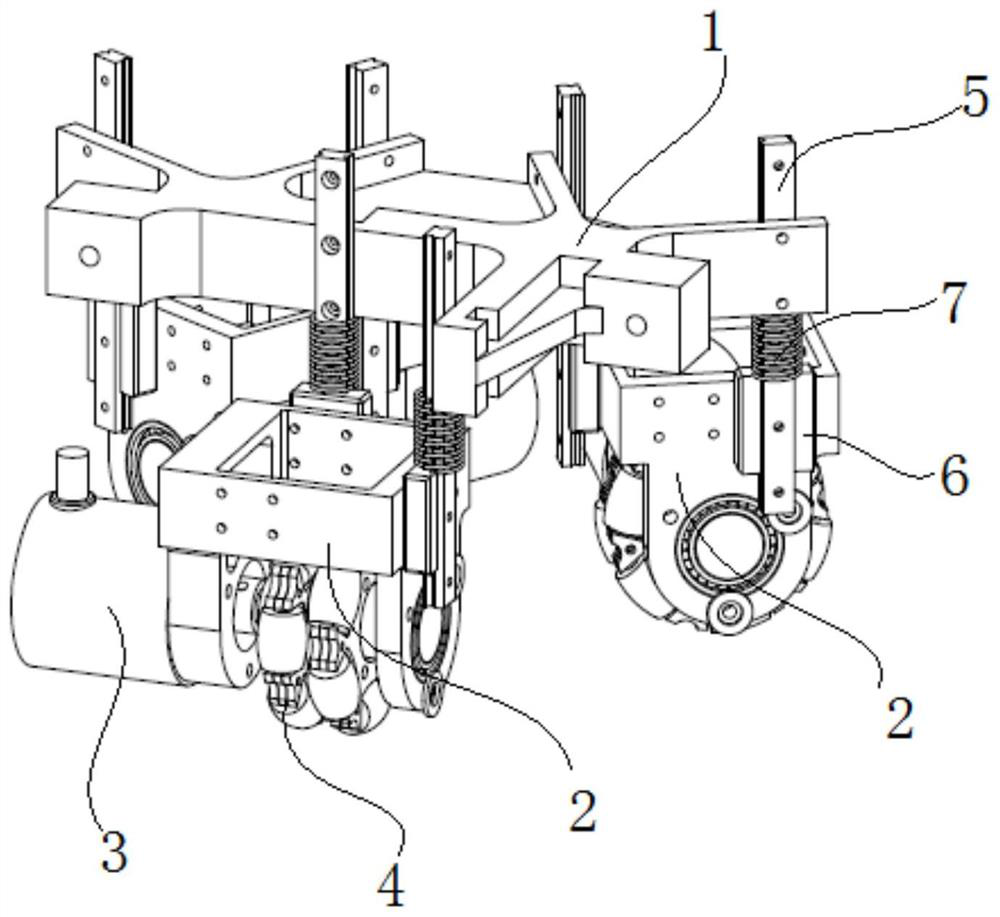
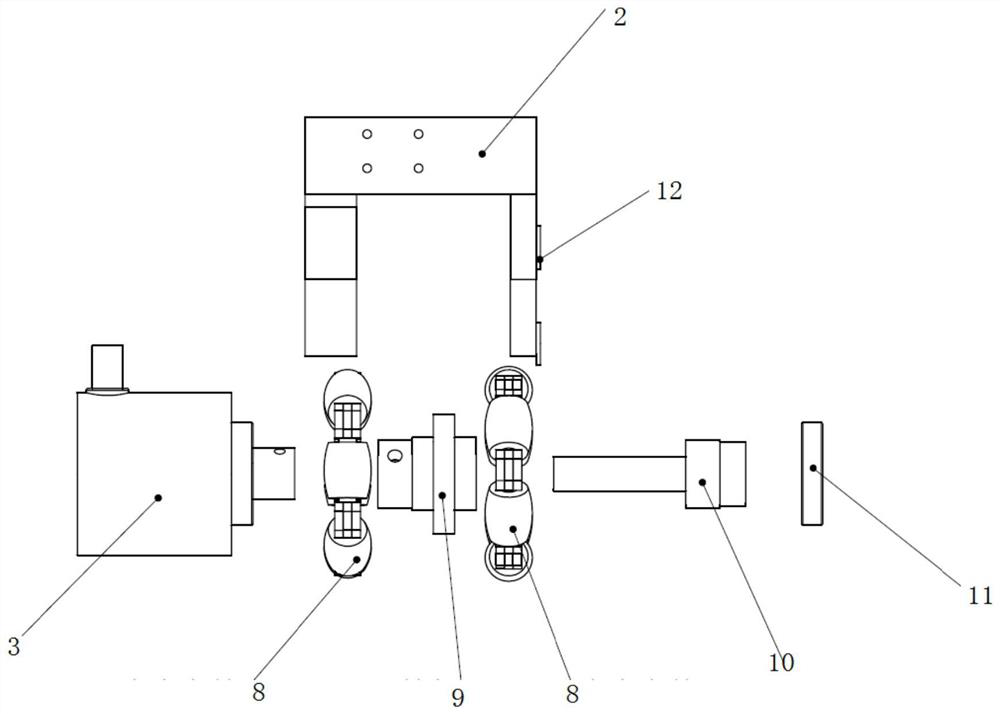
[0046] Such as figure 1 , figure 2As shown, a positioning system based on multi-sensor data fusion includes a fixed bracket 1 and a code disc frame 2, an encoder 3 and an omnidirectional wheel 4 are fixed on the code disc frame 2, and the main rotating shaft of the omnidirectional wheel 4 is connected to the encoder The rotating shafts of the encoder 3 are connected, and three code disc frames 2 are fixed on the fixed bracket 1. The included angles between the vertical planes where the shaft axes of the three encoders 3 on the three code disc frames 2 are all 120°, and the three omnidirectional The wheels touch the moving ground at the same time; the three encoders 3 are all connected to the controller for collecting the rotation data of the encoders; the controller is used to load a positioning method program based on multi-sensor data fusion;
[0047] Fixed brac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More