

Multi-unmanned aerial vehicle cooperative task scheduling method based on improved discrete particle swarm algorithm
A technique of discrete particle swarm and task scheduling, applied in computing, computing models, artificial life, etc., can solve the problems of reducing algorithm efficiency, increasing algorithm complexity, and fast speed of particle swarm algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
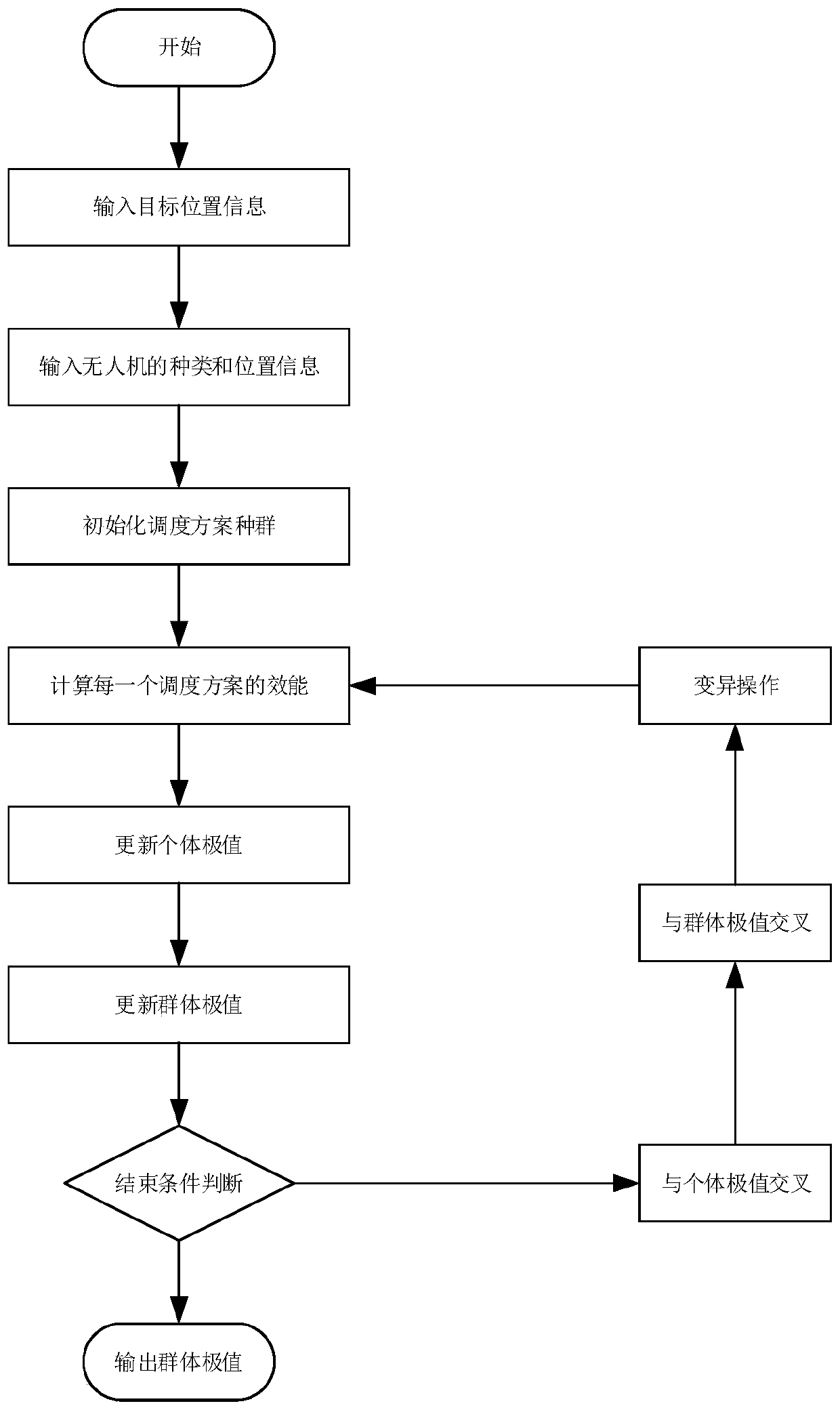
[0049] A multi-UAV cooperative task scheduling method based on improved discrete particle swarm algorithm, comprising the following steps:
[0050] Step 1) Input the total number M of enemy targets, traverse each target T j , enter the target T j The vertical and horizontal coordinates of The j represents the serial number of the target;
[0051] Step 2) Input the total number of drones N, traverse each drone U k , enter UAV U k The vertical and horizontal coordinates of and types of drones The type of the unmanned aerial vehicle includes two kinds of reconnaissance unmanned aerial vehicle and combat unmanned aerial vehicle, and said k represents the serial number of unmanned aerial vehicle;
[0052] Step 3) Initialize an empty task scheduling set PList, put all targets into a queue, each target T j reconnaissance missions that in turn include targets attack mission and strike effect assessment tasks Randomly select a target from the target queue to take out th...
Embodiment 2
[0087] A multi-UAV cooperative task scheduling method based on improved discrete particle swarm algorithm, comprising the following steps
[0088] Step 1) Enter the total number of targets 2, and input the position T of the target 1 (50, 100), T 2 (75, 75).
[0089] Step 2) Input the total number of drones 4, input the initial position and type U of the drones 1 (25, 75, scout drone), U 2 (80, 90, Scout Drone), U 3 (50, 50, Combat Drone), U 4 (75, 50, Combat Drone).
[0090] Step 3) Initialize task scheduling set Plist, set
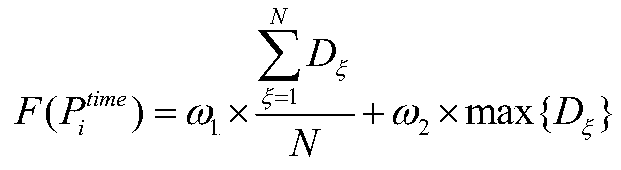
[0091] Step 4) Calculate the fitness value of each individual in the collection Plist, below with D 1 To illustrate the calculation method with an example, by P 1 0 It can be seen but
[0092] Step 5) Update the individual extremum of each individual, since it is the first iteration, the individual extremum of all individuals is itself.
[0093] Step 6) Update the group extremum value of the population, traverse each individual in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More