

Multi-mobile-robot high-precision collaborative tracking method based on ultra-wideband technology
A mobile robot and ultra-broadband technology, applied in the field of high-precision collaborative tracking of multi-mobile robots, can solve problems such as difficulty in tracking and positioning of multi-robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention is described in detail below in conjunction with accompanying drawing and specific embodiment:
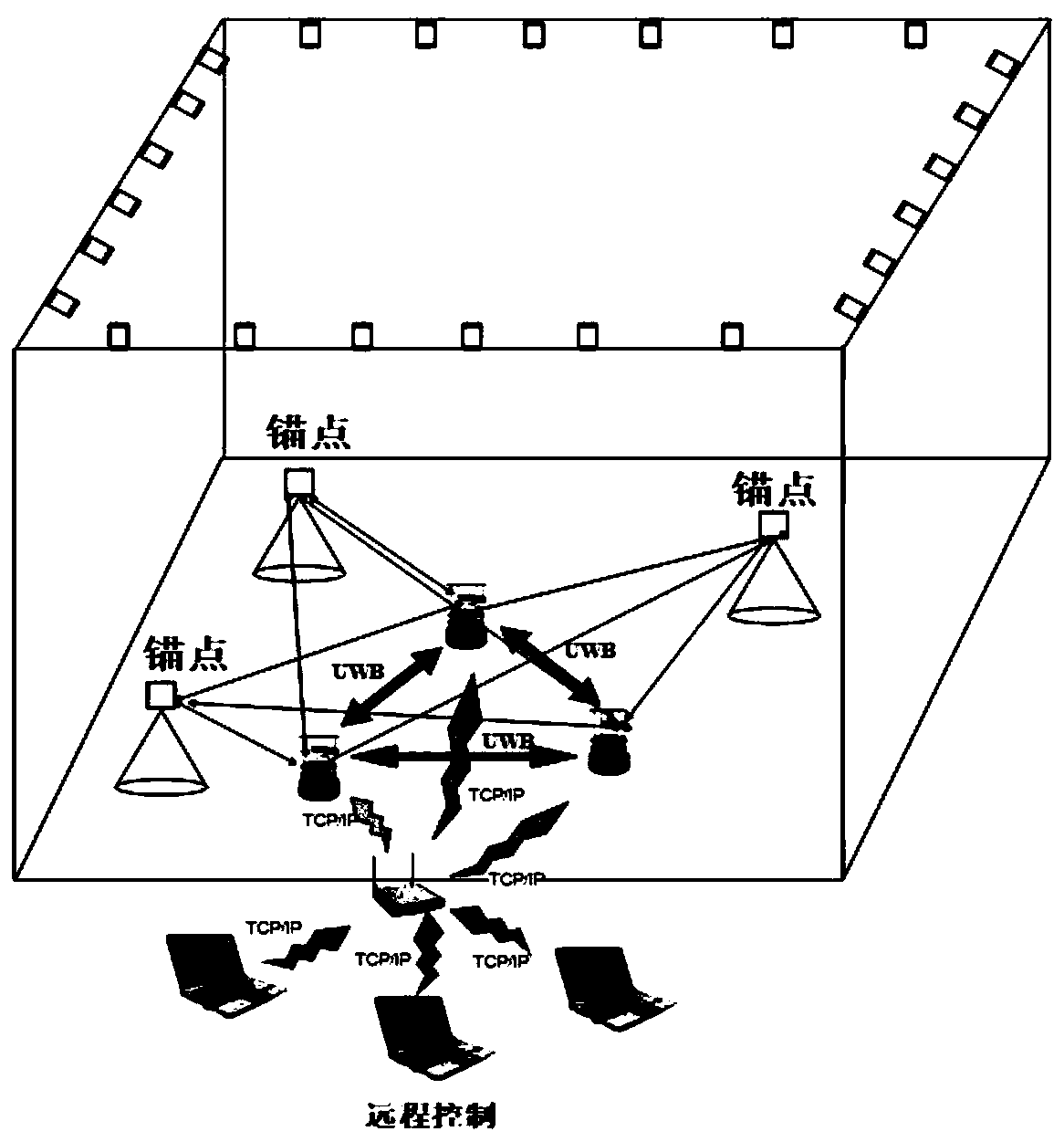
[0075] The invention provides a multi-mobile robot cooperative tracking method based on ultra-wideband (UWB) technology, and the English abbreviation of ultra-wideband is UWB. The overall block diagram of multi-mobile robot cooperative tracking system based on ultra-wideband (UWB) technology is as follows: figure 1 As shown, first, place 3 brackets at known positions, install UWB anchor points on the brackets, install UWB tags on the 3 robots, and keep the height of the UWB anchor points consistent with the height of the tags; then use the host computer to remotely control the 3 A mobile robot moves from the starting point to the target position, avoiding all static and random dynamic obstacles in the environment, and the robot uses the UWB sensor to obtain real-time distance information between the robot and the robot, and between the robot and the anc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More