

Object grabbing method based on oval surface contact
A surface contact, elliptical technology, applied in the field of robotics, can solve the problem that the shape of the real contact area between the manipulator and the target object cannot be accurately modeled, and achieve the effect of reducing time and energy costs and high grasping success rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
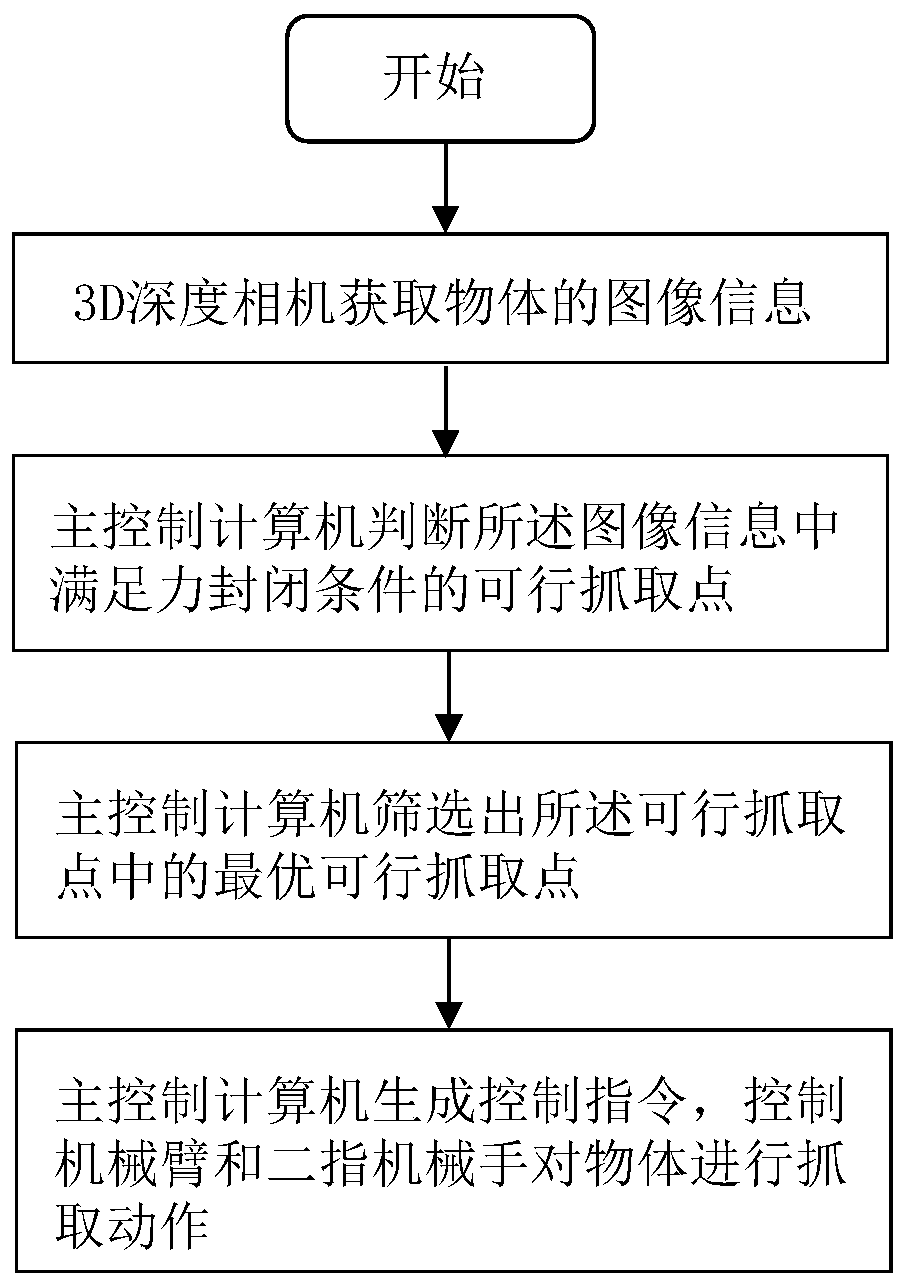
[0032] The present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
[0033] Non-limiting and non-exclusive embodiments will be described with reference to the following drawings, wherein like reference numerals refer to like parts unless specifically stated otherwise.
[0034] Key terms designed in the present invention are defined as follows:
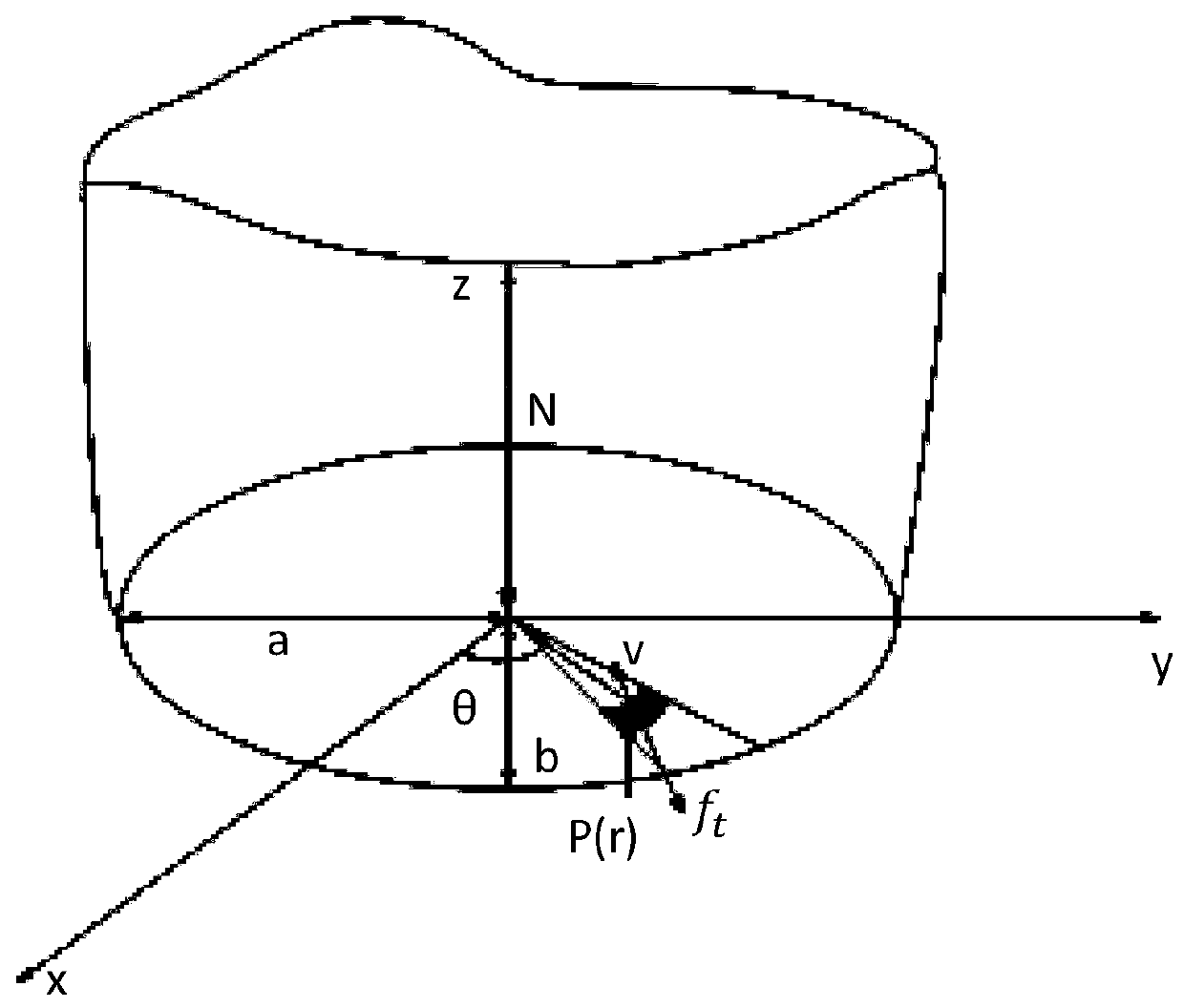
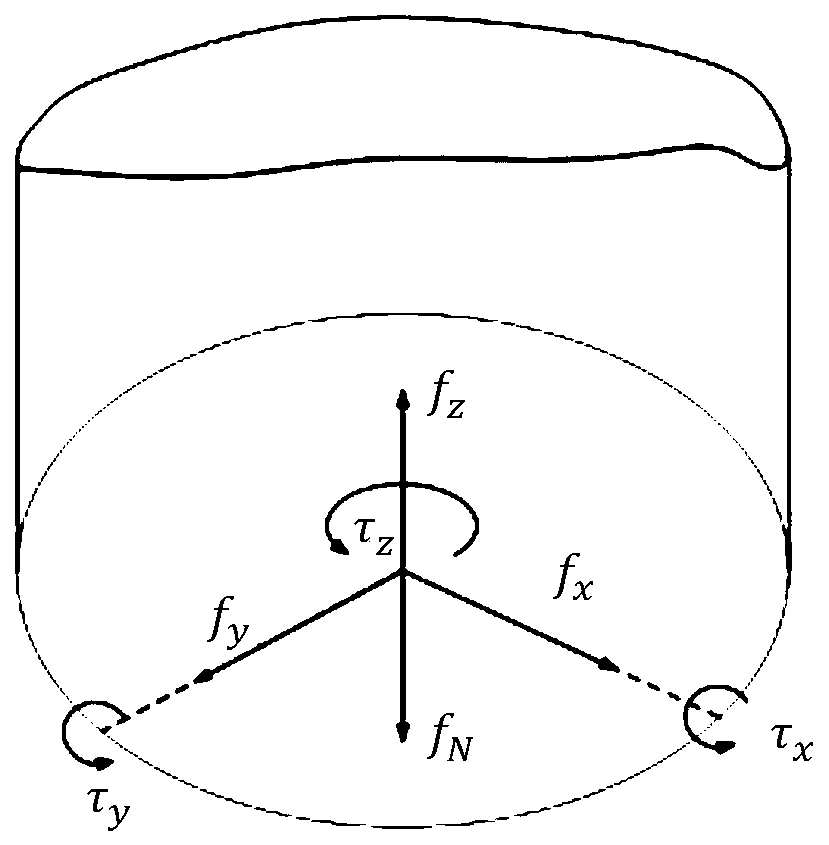
[0035] A. Force closure condition: refers to the ability of the manipulator to realize the contact force applied to the object to be grasped and to balance any external force and external moment under the corresponding friction constraint conditions. The method usually used to judge whether a grasping method satisfies the force closure condition is based on whether its corresponding grasping matrix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More