

Target motion location method based on underwater acoustic detection
A positioning method and target technology, applied in the field of target positioning, can solve the problems of inability to make adaptive adjustments in time, divergence, and decrease in estimation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The preferred embodiments of the present invention will be described below in detail with reference to the accompanying drawings. The accompanying drawings constitute a part of this application and are used together with the embodiments of the present invention to explain the principle of the present invention, and are not used to limit the scope of the present invention.
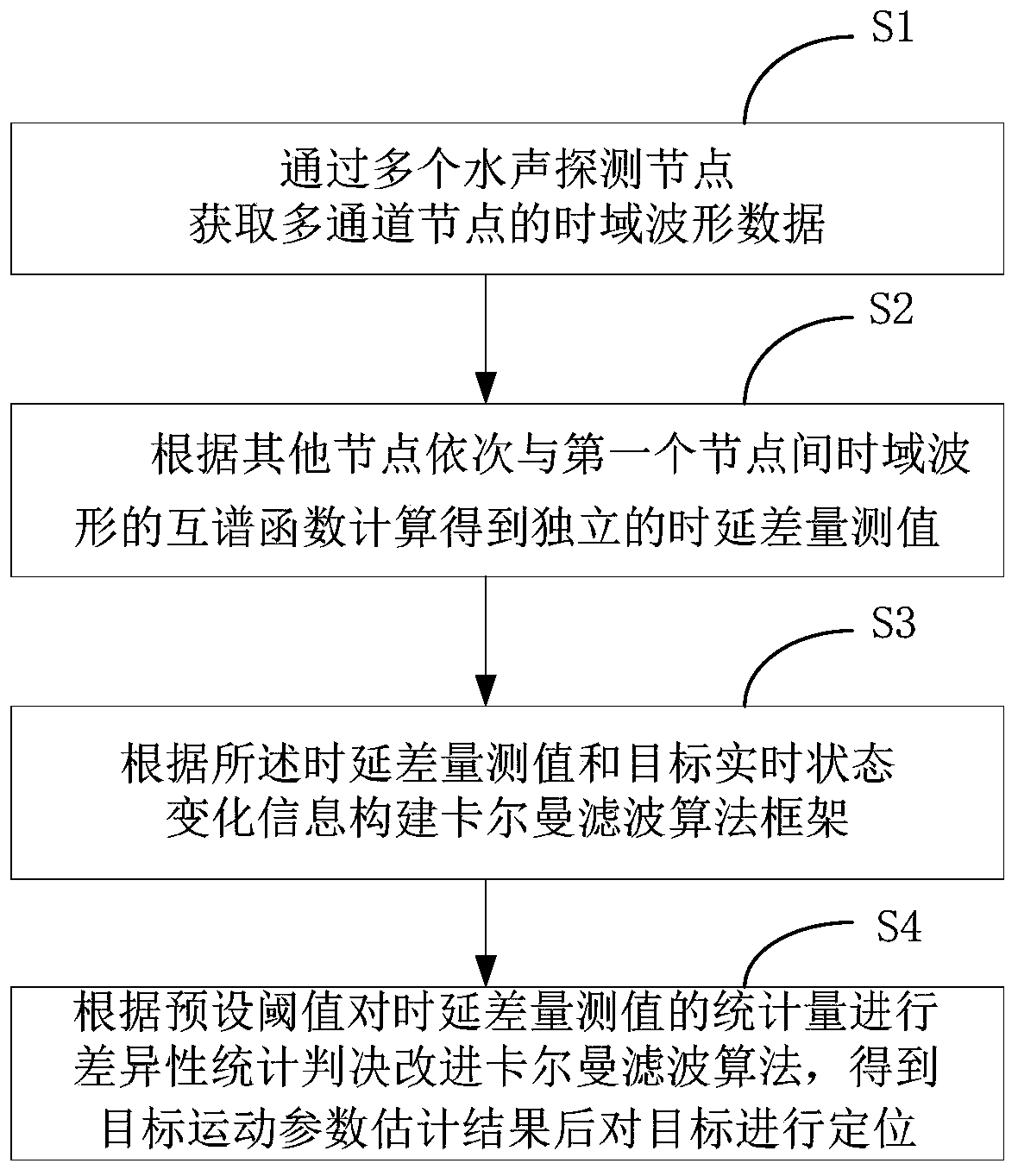
[0054] A specific embodiment of the present invention, such as figure 1 As shown, a target motion positioning method based on underwater acoustic detection is disclosed, including the following steps:
[0055] S1: Obtain time-domain waveform data of multi-channel nodes through multiple underwater acoustic detection nodes;
[0056] S2: Calculate the independent time delay difference measurement value according to the cross-spectrum function of the time domain waveform between other nodes and the first node in turn;
[0057] S3, constructing a Kalman filter algorithm framework according to the measured value o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More