

Vehicle Trajectory Prediction Method Based on Hybrid Dynamic Bayesian Network and Gaussian Process
A dynamic Bayesian and Gaussian process technology, applied in the direction of control devices, etc., can solve the problems of not considering vehicle driver information, poor interpretability, and ignoring influence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0101] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
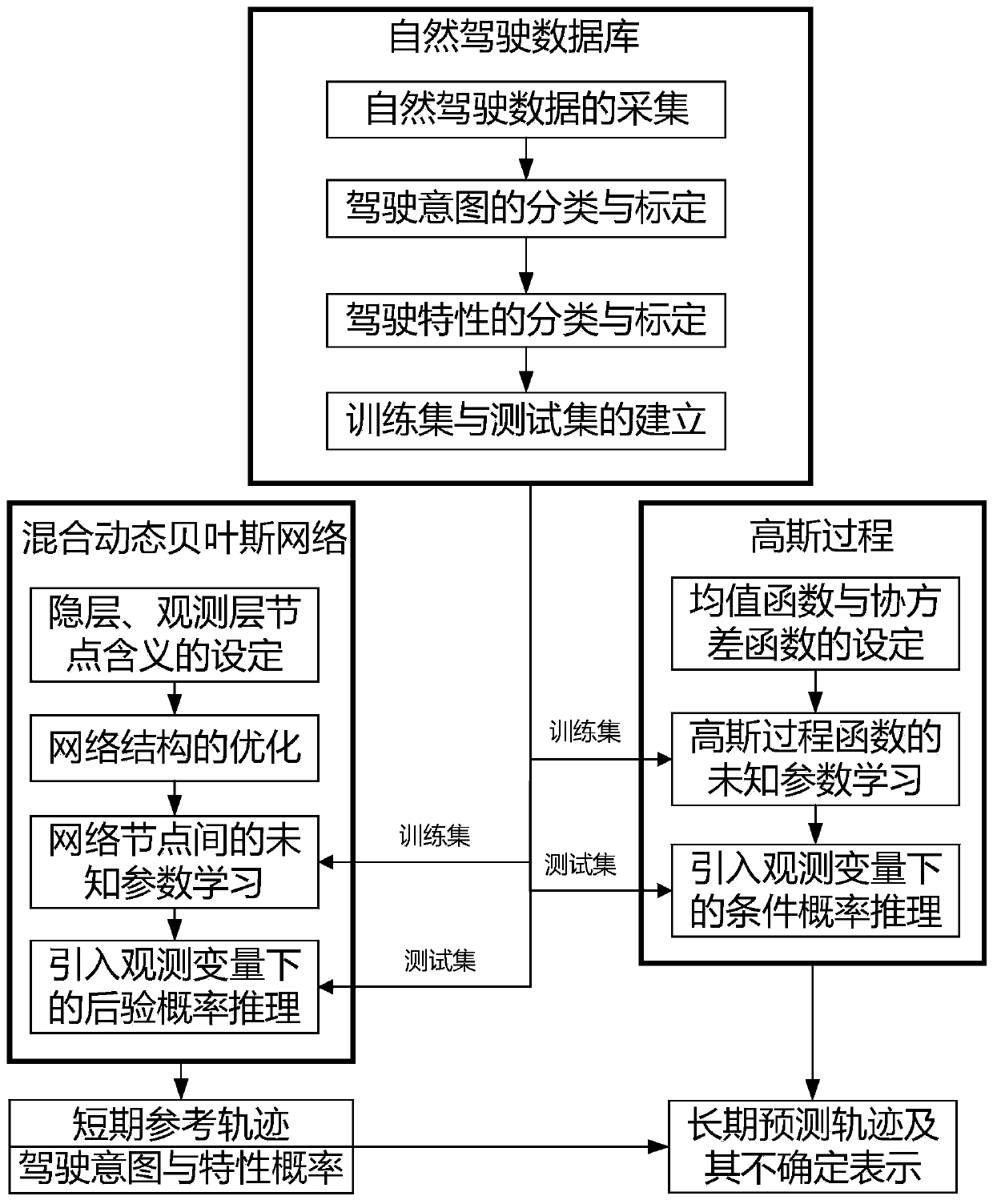
[0102] Such as figure 1 As shown, the vehicle trajectory prediction method based on hybrid dynamic Bayesian network and Gaussian process includes the following steps:
[0103] Step 1. Build a natural driving database;
[0104] Establish a test set of surrounding vehicle-related sequence information, road-related sequence information and traffic-related sequence information collected by the automatic driving vehicle perception system, and a training set for calibrating driving intention and driving characteristics on the above information; wherein, the test set includes a mixture of The test set of dynamic Bayesian network and the test set of Gaussian process; The training set includes the training set of hybrid dynamic Bayesian network and the training set of Gaussian process;
[0105] The related sequence information of surrounding vehicles includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More