

Automatic-driving intelligent vehicle trajectory tracking control strategy based on deep reinforcement learning
A technology of autonomous driving and reinforcement learning, applied in biological models, knowledge expression, instruments, etc., can solve problems such as uncertainty, unpredictable vehicles, nonlinearity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
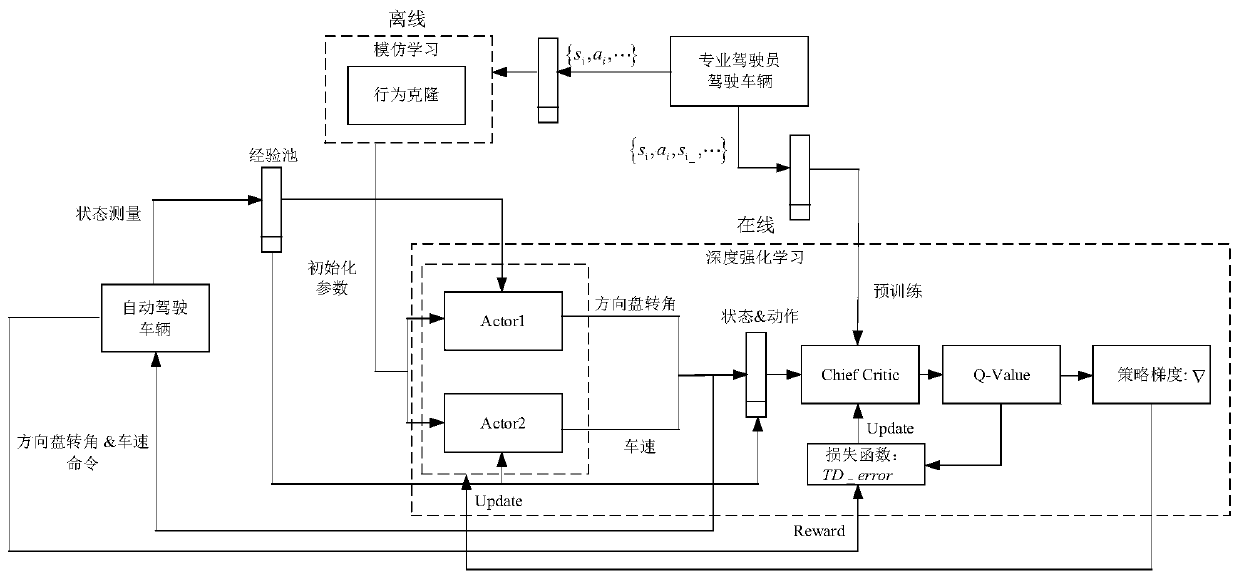
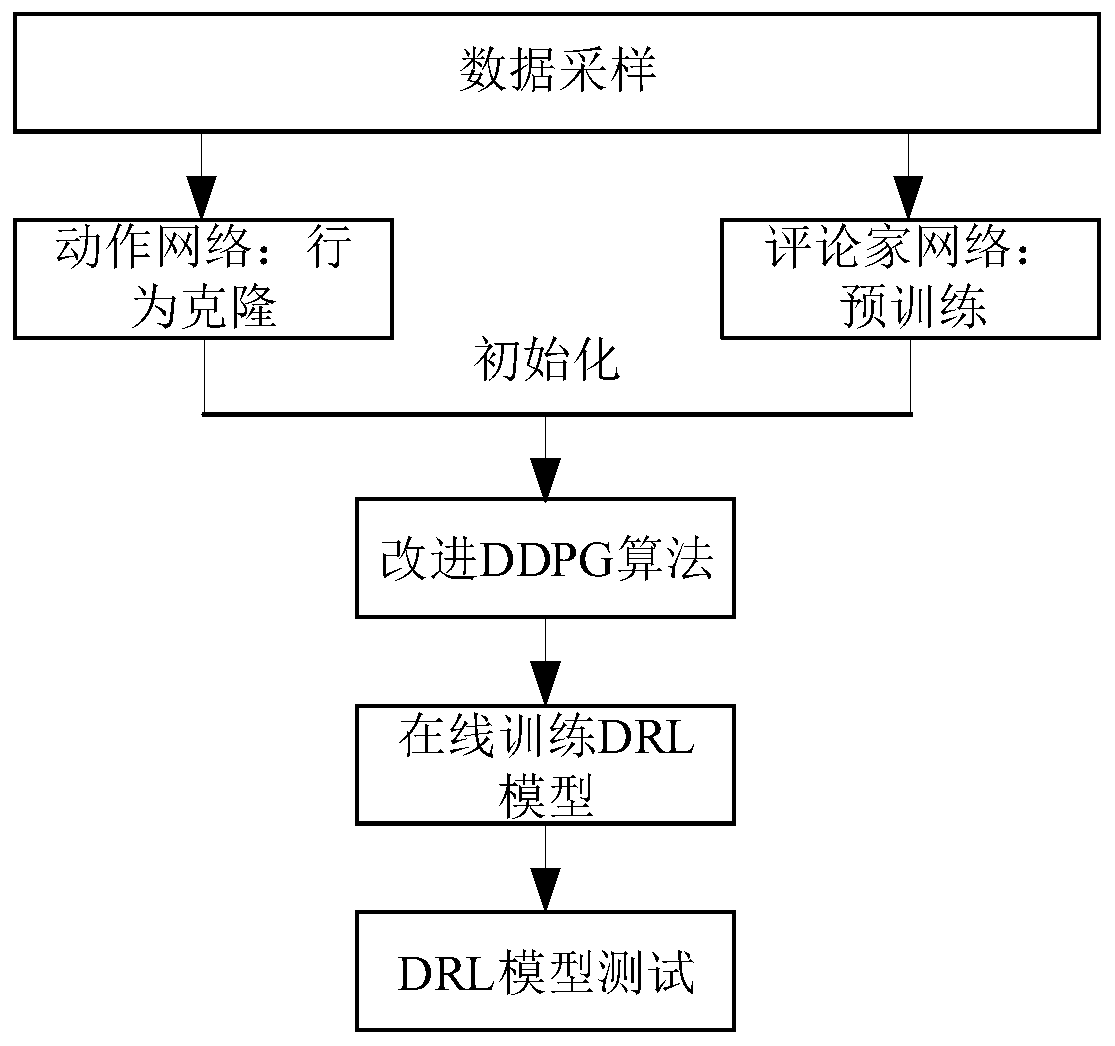
[0147] Embodiment: implementation process of the present invention:
[0148] 1. For the automatic driving task of the vehicle, through a large number of tests and screenings, the following 14 easily obtained vehicle kinematics and dynamics information are selected as the state vectors input by the system, mainly including:
[0149] δ is the steering wheel angle of the vehicle, and the signal comes from the steering wheel angle sensor;
[0150] v is the vehicle speed, the signal comes from the vehicle speed sensor;
[0151] l_div_i is the deviation from the driver's preview point to the reference path, the signal comes from the driver's preview information, where: i=1,2,3,4,5;
[0152] v_i is the equivalent wheel speed, the signal comes from the wheel speed sensor, where: i=1,2,3,4;
[0153] lat_veh is the lateral deviation between the current position of the vehicle and the reference path, and the signal comes from the current position information of the vehicle;
[0154] v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More