

Free floating space mechanical arm self-adaptive fault-tolerant control method with specified tracking performance
A space manipulator, fault-tolerant control technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as uncertainty, inability to obtain accurate actuator fault information and system nonlinearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
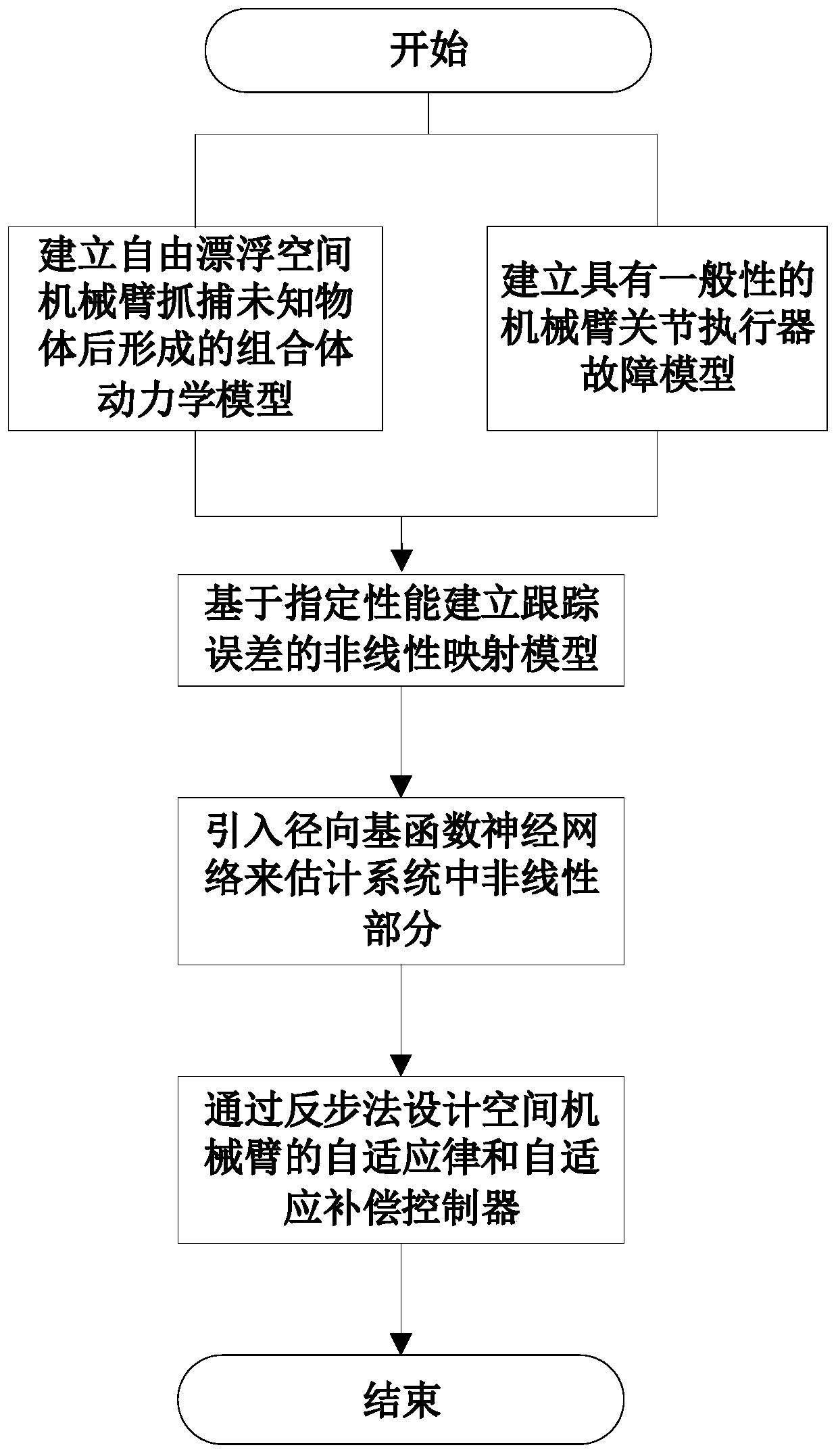
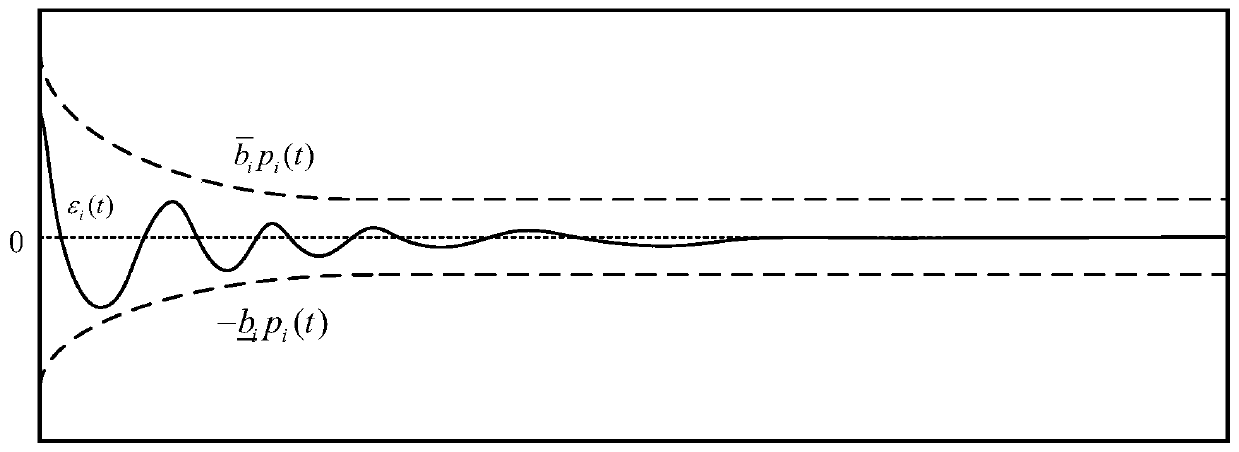
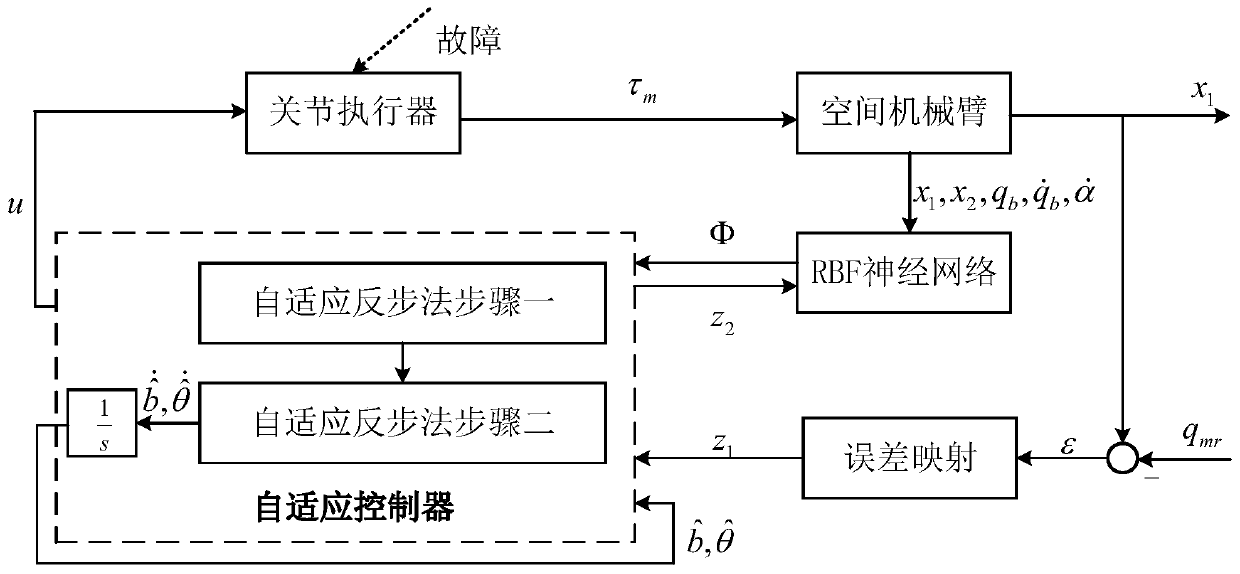
[0045] Such as figure 1 As shown, the steps of an adaptive fault-tolerant control method for a free-floating space manipulator with specified tracking performance of the present invention are as follows: the first step is to establish a dynamic model of a free-floating space manipulator forming an assembly after catching an unknown object and having A general fault model for joint actuators of manipulators; the second step is as follows: figure 2 The preset specified performance function shown in the figure establishes the error value of the joint angle of the manipulator after nonlinear mapping, which is image 3 The error mapping part in; the third step introduces the radial basis function neural network to estimate the unknown nonlinear part in the system, this step is image 3 The RBF (RadialBasis Function) neural network part in ; the fourth step is to design the adaptive law and adaptive compensation controller of the space manipulator through the backstepping method, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More