

An Indoor Positioning Method Fused with Fuzzy Logic Judgment and Map Information
A technology based on map information and fuzzy logic, applied in location information-based services, ground navigation, services based on specific environments, etc., can solve problems such as poor positioning results, lower overall fusion positioning accuracy, and WiFi signal interference fluctuations, and achieve increased Stability, solve the problem of positioning point jumping, and avoid the effect of fusion positioning error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
[0050] With reference to the drawings, the indoor positioning method of fusion fuzzy logic judgment and map information includes the following steps:
[0051] Step 1: Indoor pedestrian trajectory estimate, use two-dimensional vector [x, y] T Represents the location of the pedestrian and updating the position of the pedestrian according to the formula (1):
[0052]
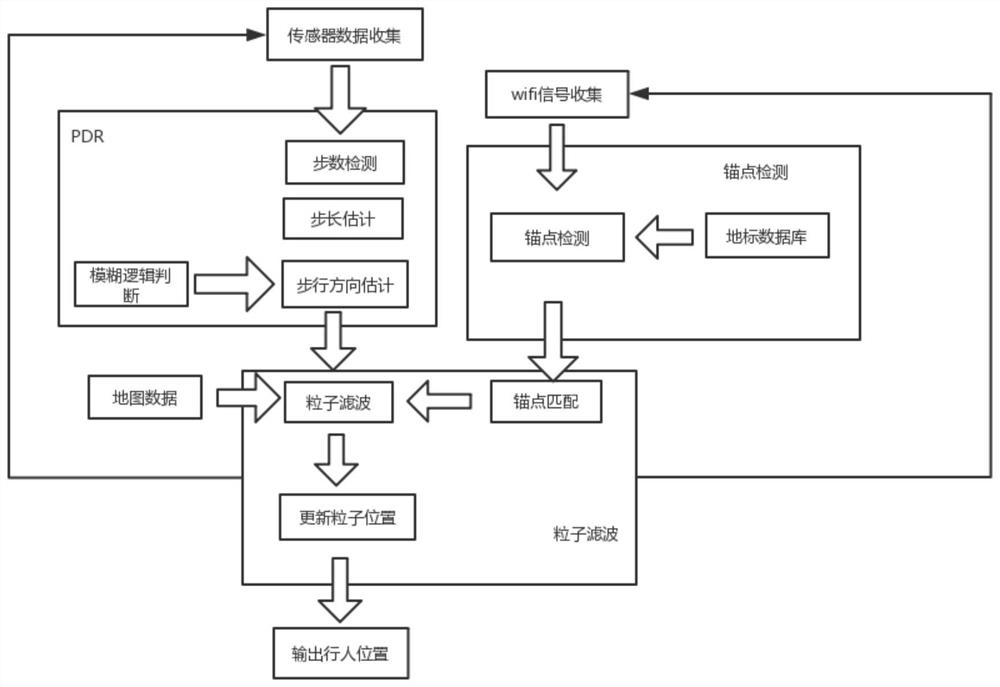
[0053] Among them, [x i-1 Y i-1 ] T Representing the location of the I-1, θ i S i Represents the walking direction and steps of the first step; the pedestrian track estimation operator system mainly consists of three parts of walking detection, walking direction and step size estimation, pedestrian DEAD RECKONG, PDR) algorithm See figure 1 .
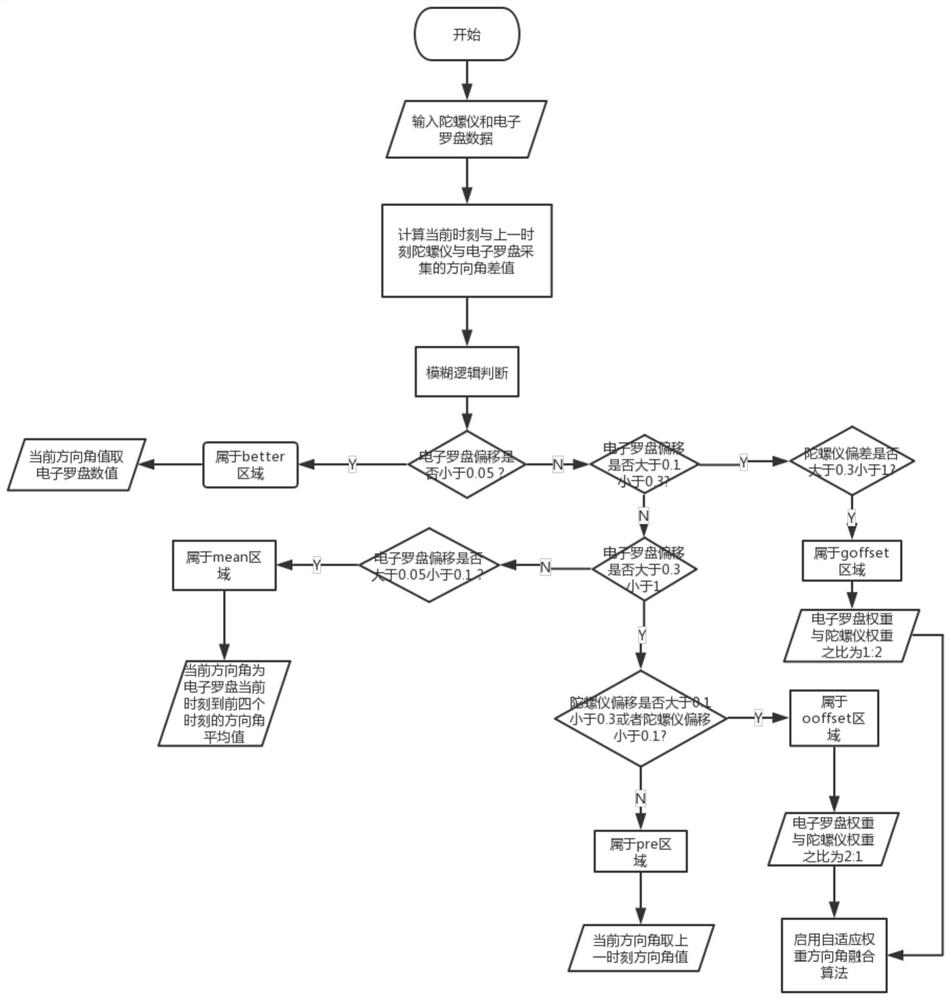
[0054] Step 2: Based on the adaptive weight direction angle fusion algorithm based on fuzzy logic, it is first determined whether or not the fusion algorithm is enabled or simply using a directional angle data of a cer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More