

SINS self-aided navigation method for deep diving manned submersible
A technology of manned submersibles and navigation methods, which is applied in the field of underwater navigation and positioning of manned submersibles, and can solve problems such as the influence of multipath effects, the correlation between positioning accuracy and operating distance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
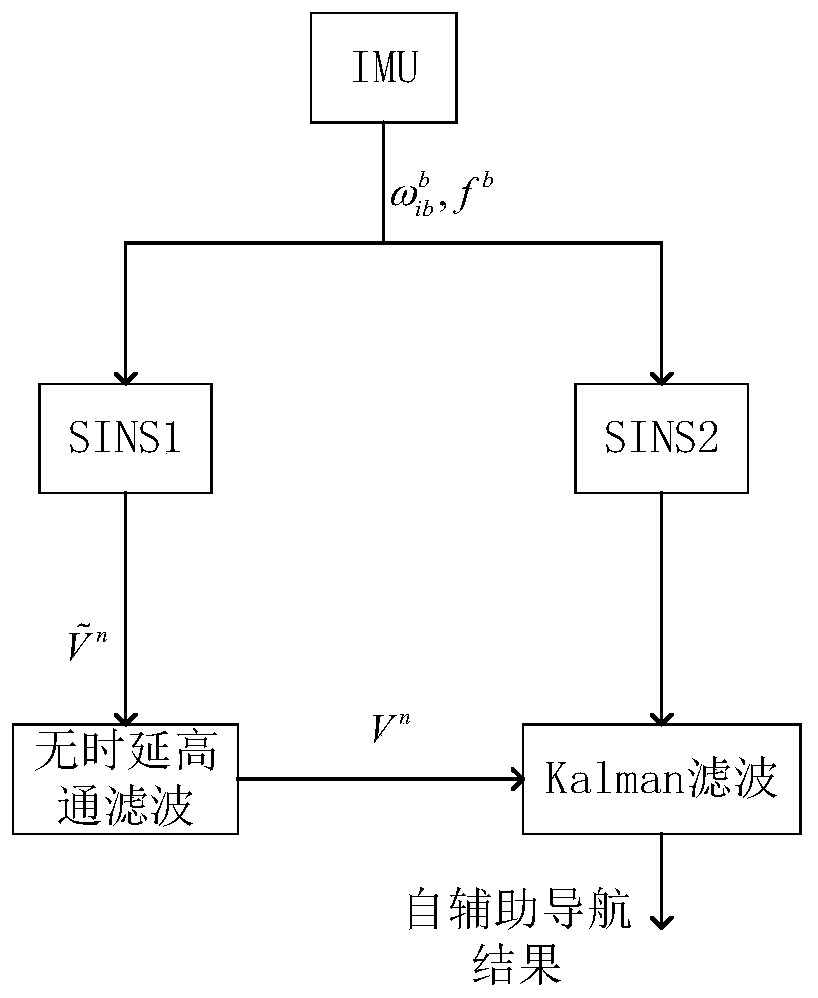
[0073] A kind of SINS self-assisted navigation method of deep submersible manned submersible described in the present invention, structural frame is as follows figure 1 shown, including the following steps:
[0074] Step 1: Use the angular motion and linear motion measurements provided by the inertial measurement unit (IMU) on the manned submersible as the input of the strapdown inertial navigation system (SINS), execute the navigation solution algorithm twice in parallel, and output two sets of identical The navigation parameters, that is, attitude, velocity and position, so as to obtain two identical sets of strapdown inertial navigation SINS, namely SINS1 and SINS2.
[0075] The inertial measurement unit (IMU) includes three gyroscopes orthogonal to each other and three accelerometers orthogonal to each other, and the gyro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More