

A Support Vector Machine-assisted Underwater Maneuvering Target Tracking Method Based on Interactive Multi-Model
An interactive multi-model, maneuvering target tracking technology, applied in the field of target tracking, can solve the problems of poor tracking effect, difficulty in using historical information of measurement and estimation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
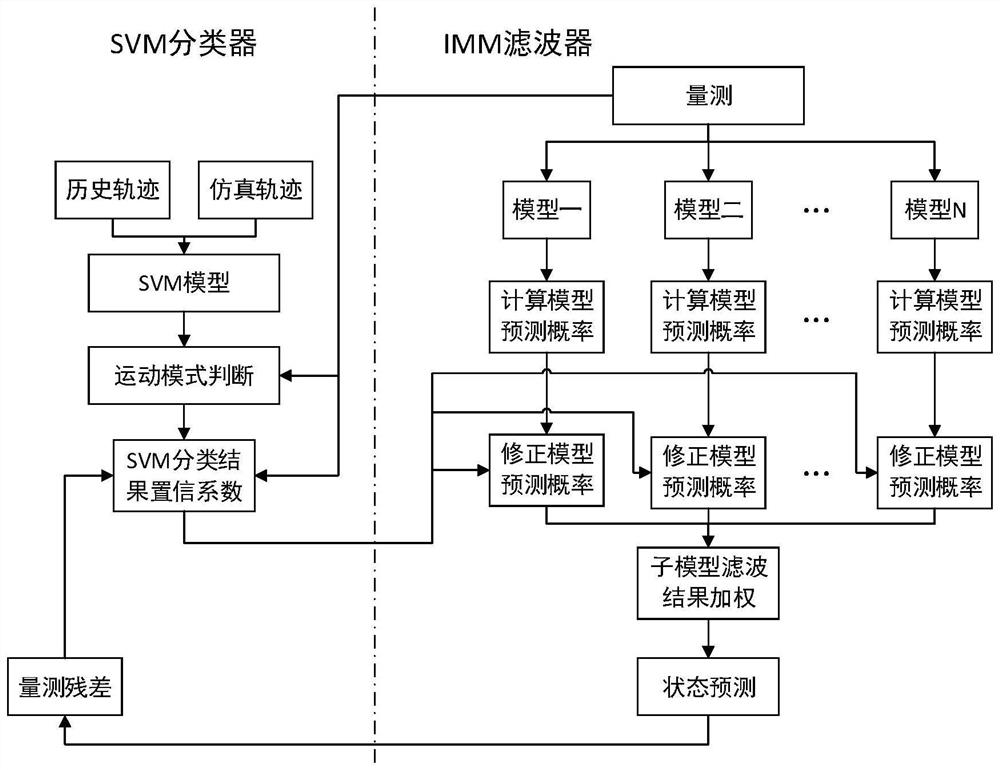
[0078] The flow chart of the support vector machine assistance tracking algorithm based on the interactive multi-model of the present invention is proposed. figure 1 As shown, the target tracking, that is, the target next time state is predicted, and the status estimate of the target current time is required by tracking sonar or UWSNs. It is assumed that the tracking sonar or UWSNS has given the digital signal measured by the current time, that is, the present invention regards the problem of obtaining the measurement of the measurement, and the problem of information fusion.
[0079] The implementation of the present invention will be described in detail below with reference to the accompanying drawings, and the specific operation mode and the implementation step are given.
[0080] The tracking target is an object of exercise under water three-dimensional space, regarding it as a mass point, which can be described in the formula:
[0081] X k = F k-1 X k-1 + w k-1
[0082] amon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More