

A kind of intelligent vehicle multi-objective driving control method and decision-making system
A control method and multi-objective technology, applied in the field of intelligent vehicle multi-objective driving control method and decision-making system, can solve the problem of no clear decision-making model specific structure decision-making model training operation method and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
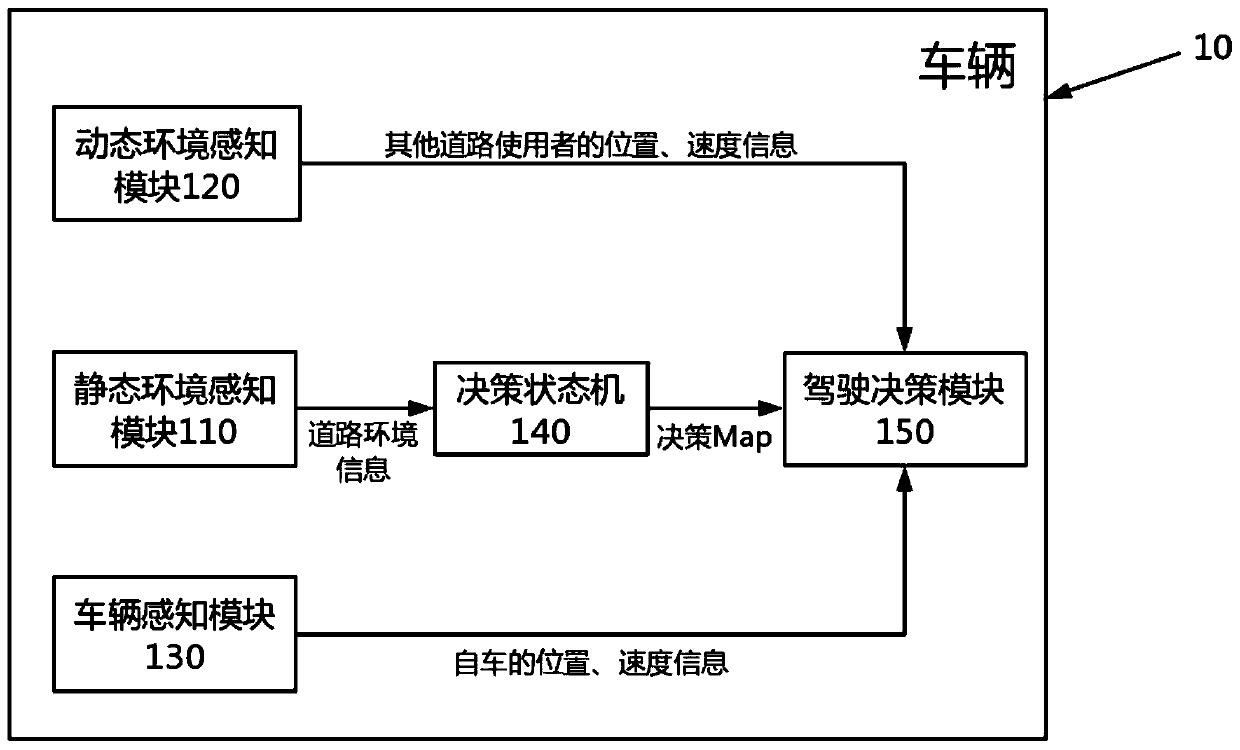
[0087] The smart car multi-objective driving decision-making system provided in this embodiment is installed on the vehicle to be controlled 10, the vehicle to be controlled 10 is an automatic or semi-automatic vehicle, and has all the features and functions of a non-automatic vehicle. For example: the steering system, braking system, navigation system, etc. required to complete the driving task. The automatic vehicle can drive automatically in all road environments by controlling the throttle, brake pedal, steering wheel and other actuators without the intervention of a human driver. The semi-automatic vehicle can drive automatically in some road environments, such as highways, by controlling actuators such as the throttle, brake pedal, and steering wheel, and requires human drivers to intervene in emergency situations. The smart car multi-objective...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More