

Visual-based parallel robot sorting system and sorting method
A robot system and sorting system technology, applied in the field of visual judgment of industrial robots, can solve the problems of unstable sorting quality, multi-color workpiece handling and low sorting efficiency, so as to relieve work intensity, save costs, and reduce labor fatigue. degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
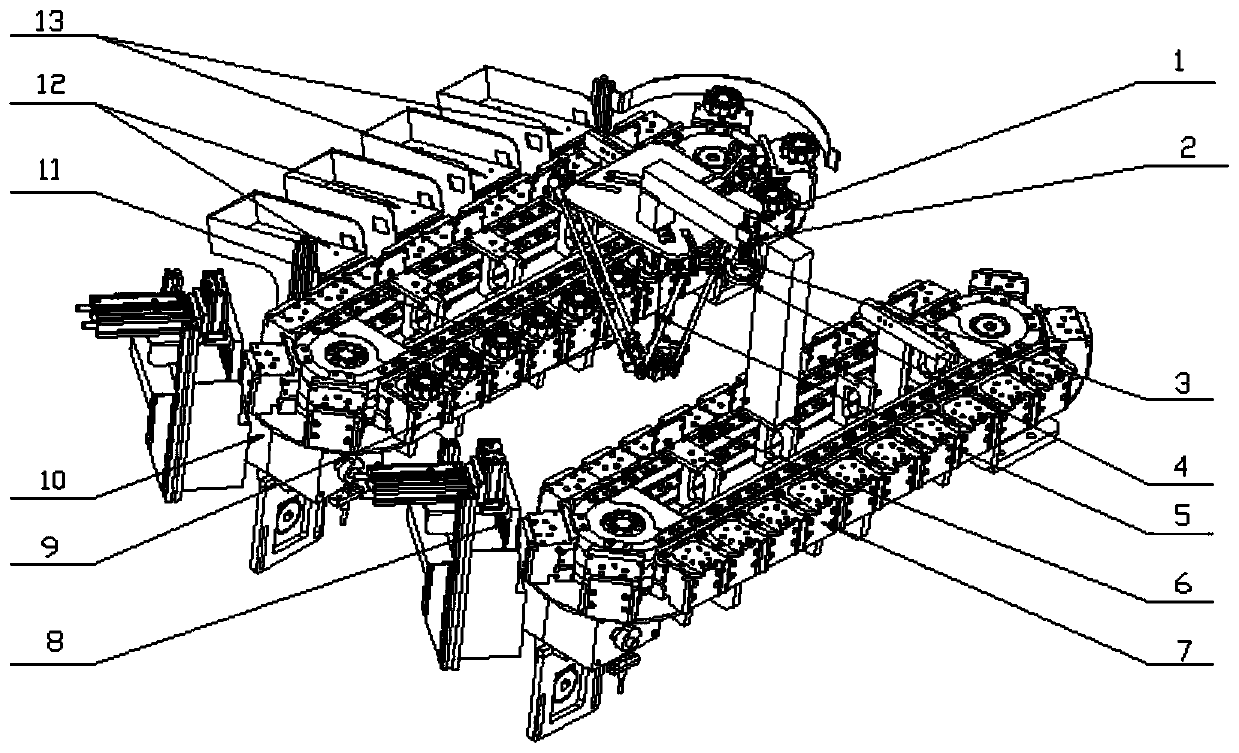
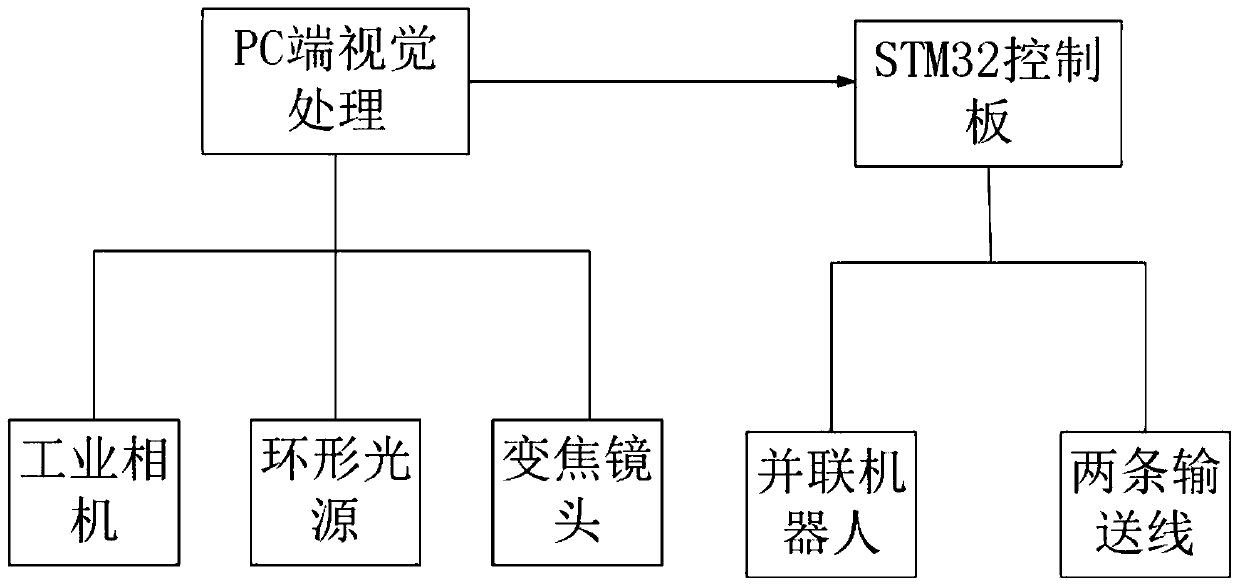
[0022] Such as Figure 1 to Figure 3 As shown, the present invention discloses a vision-based parallel robot sorting system and sorting method. The system includes four major units: two circular conveying lines (workpiece conveying line 7 and packaging box conveying line 8), based on STM32 control The parallel robot system, the control system and the camera system placed above the workpiece conveying line 7.
[0023] The control system includes the host computer and the PC terminal 8, the camera 2 is connected to the PC terminal 8 through USB, the parallel robot system based on STM32 is connected to the PC terminal 8 through the USB to RS485 converter, and the STM32 control board controls the start and stop of the two conveying lines .
[0024] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More