

Vision-based collaborative robot logistics sorting system and using method thereof
A sorting system and robot technology, applied in sorting and other directions, can solve the problems of lack of flexibility and rapid adaptability, inability to achieve adjustment and calibration, and error-prone, so as to improve sorting efficiency and automation level, and improve kinematics. and dynamics, the effect of easy movement and placement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific implementation manners of the present invention will be further described below with reference to the accompanying drawings.
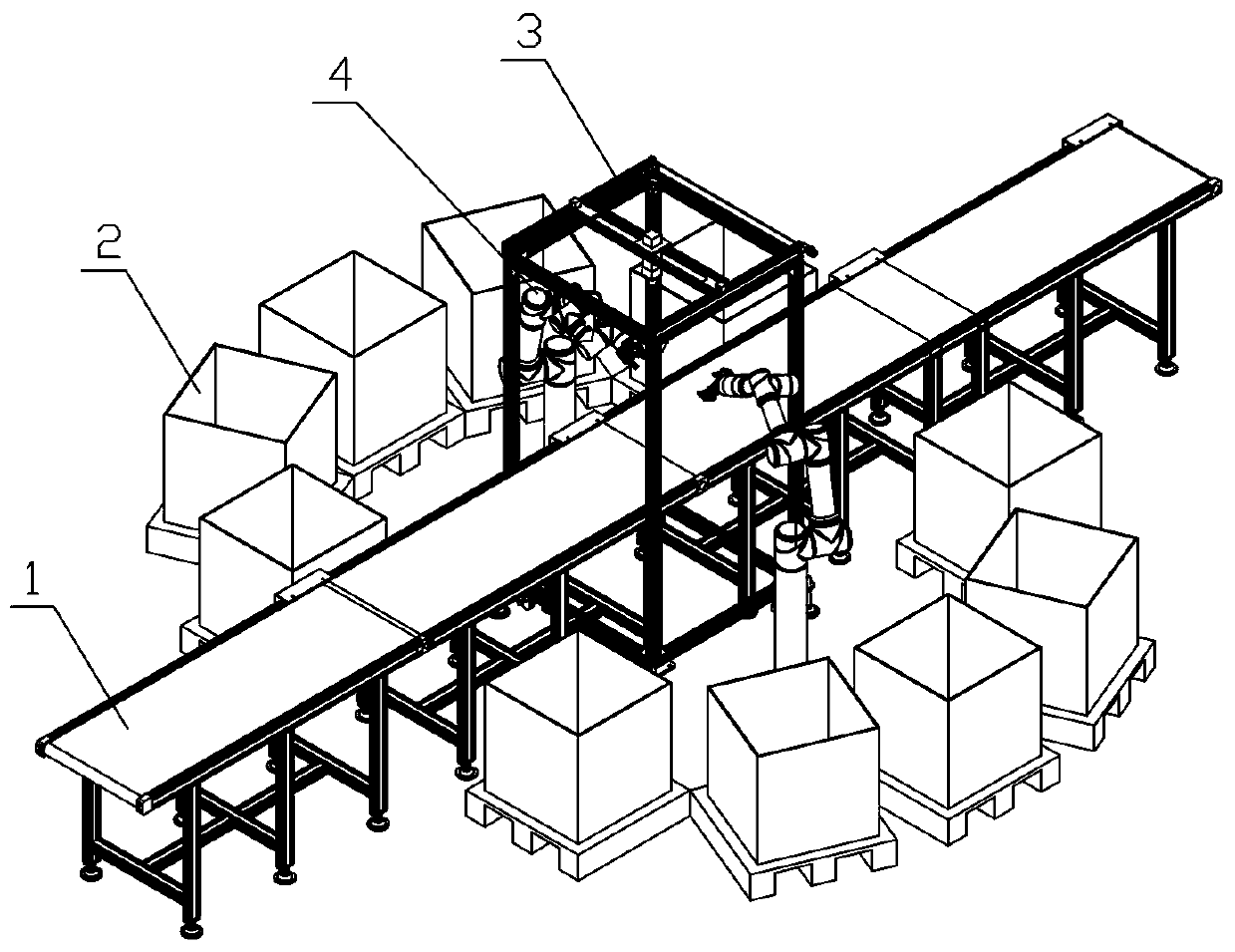
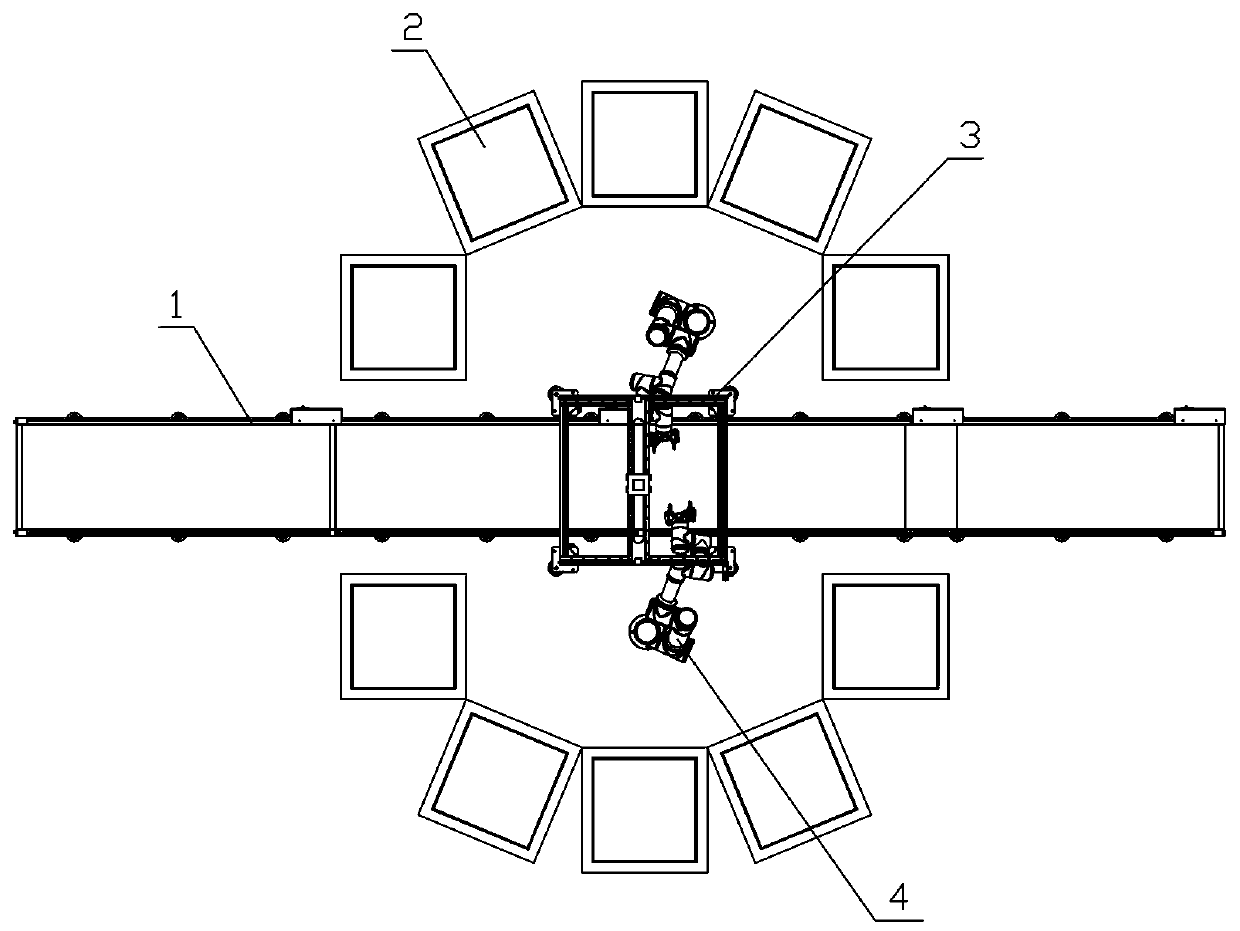
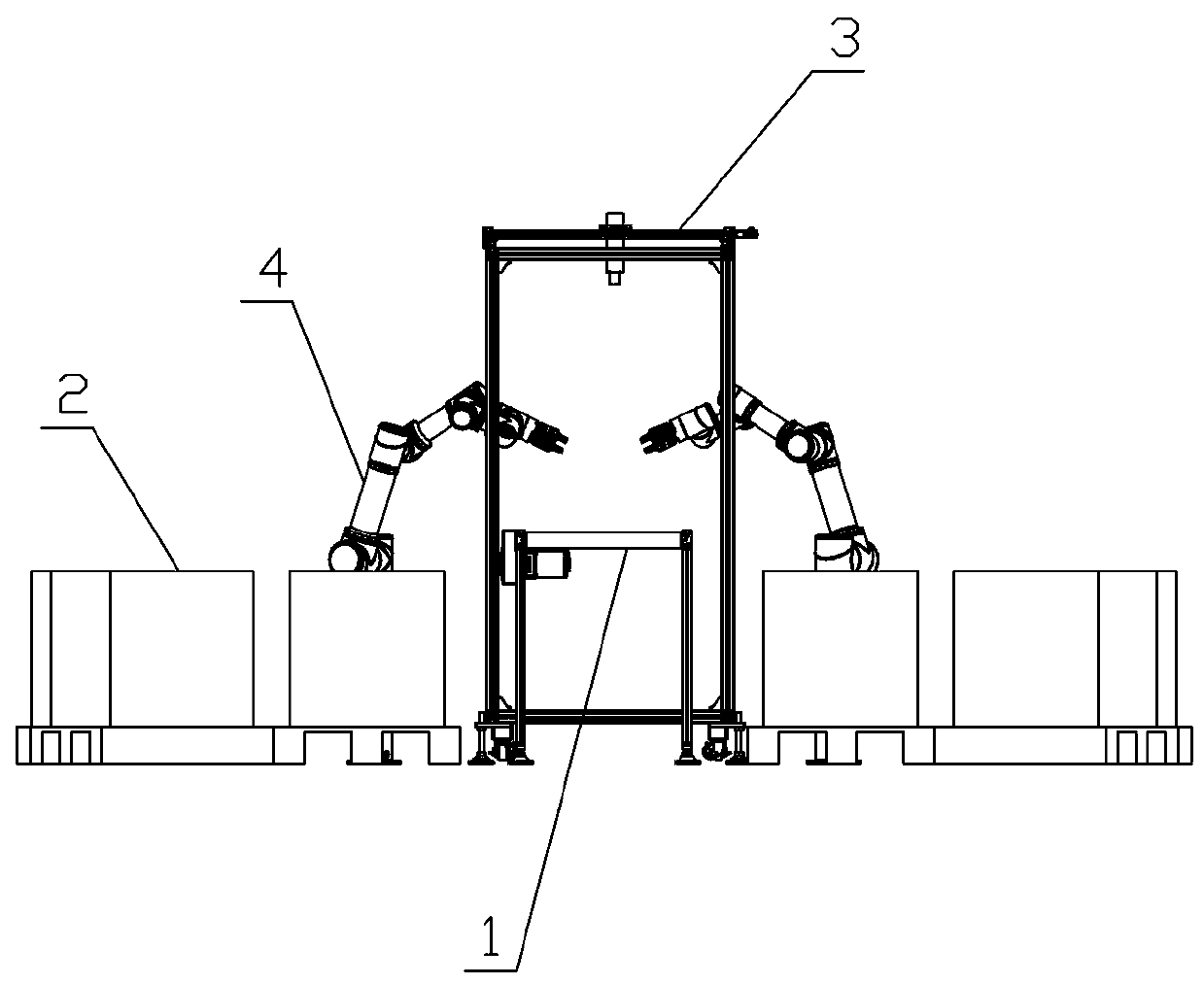
[0038] Such as Figure 1 to Figure 5 As shown, a vision-based collaborative robot logistics sorting system includes a logistics conveying line 1, a packing box 2, a three-degree-of-freedom visual inspection device 3, a collaborative robot 4, and a control system (not shown in the figure). The visual detection device 3 is installed above the logistics conveying line 1 in coordination with activities, and the visual detecting device 3 adaptively coordinates and recognizes the position and information of the conveying parts on the logistics conveying line 1, and recognizes the collaborative robot 4 The position of the gripping end; the collaborative robot 4 is cooperatingly installed on both sides of the logistics conveying line 1, and the sub-packing box 2 is evenly matched and correspondingly arranged around the cobot 4, and the cobo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More