

Six-degree-of-freedom ROV simulation driving system and simulation method thereof
A technology for simulating driving and degrees of freedom, applied in simulators, simulators for space navigation conditions, teaching models, etc., can solve problems such as damaged equipment, inability to achieve high-precision matching between training and actual combat, and operational effect errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The content of the invention of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
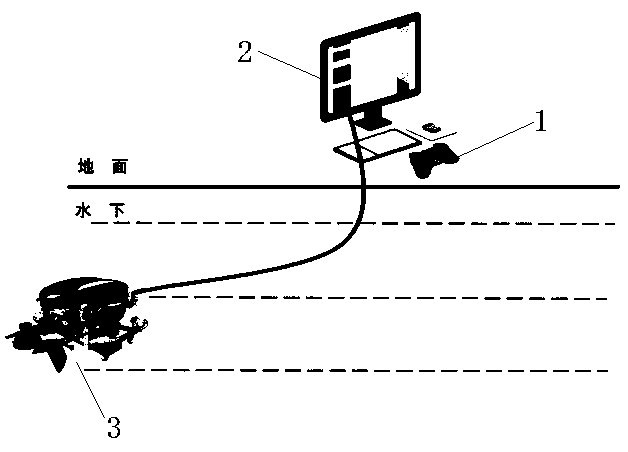
[0048] see Figure 1-2 A six-degree-of-freedom ROV simulation driving system shown includes a remote control handle 1 located on the ground, a ground station computer terminal 2, and an underwater data acquisition body 3 located on the underwater part, wherein:
[0049] The remote control handle 1 is connected with the computer terminal 2 of the ground station through a USB mode, and is used to input the operating data of the simulated driving system to the underwater data acquisition body 3;
[0050] The computer terminal 2 of the ground station is connected to the underwater data acquisition body 3 through network communication, and is used to realize the simulation of the motion operation, posture operation and underwater operation effect of the underwater data acquisition body in water, and the instrumentation obtaine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More