

Pipeline inner wall spraying robot adaptive to pipe diameter
A spraying robot and self-adaptive technology, applied in spraying devices, chemical instruments and methods, cleaning hollow objects, etc., can solve the problems of uneven paint spraying, difficulty in manual spraying, and difficulty in cleaning pipes, and achieve simple structure and high spraying efficiency. , the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
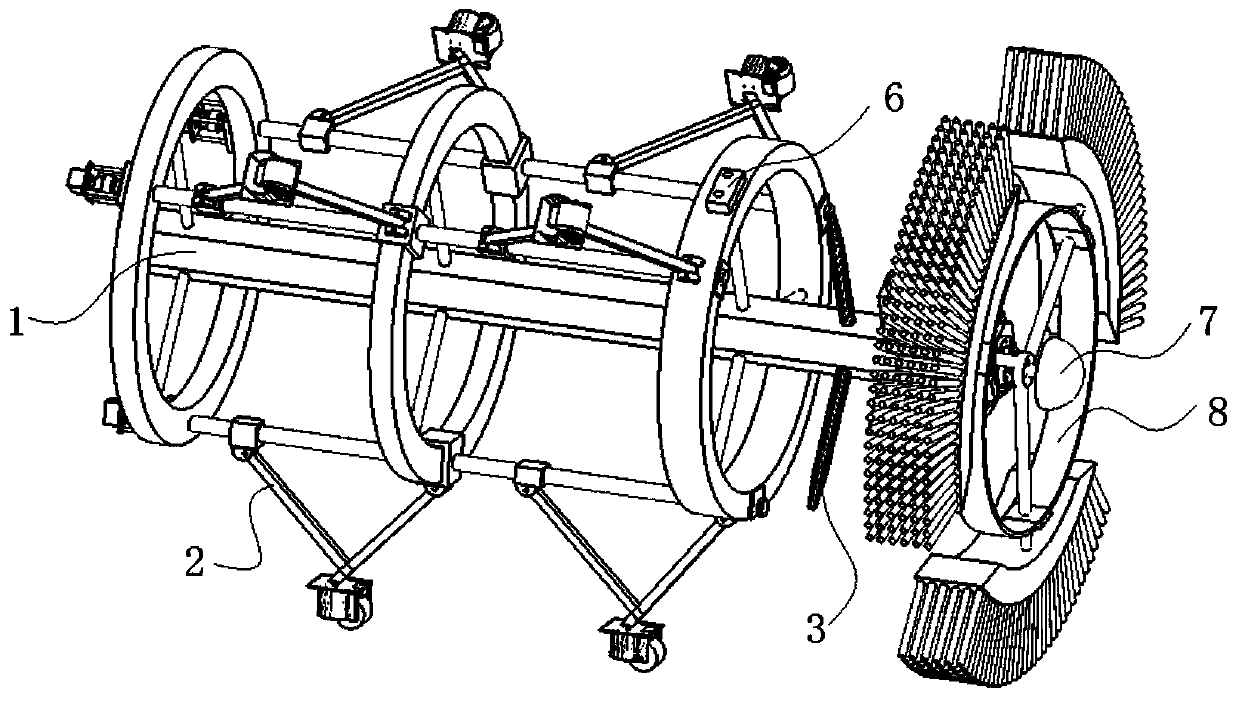
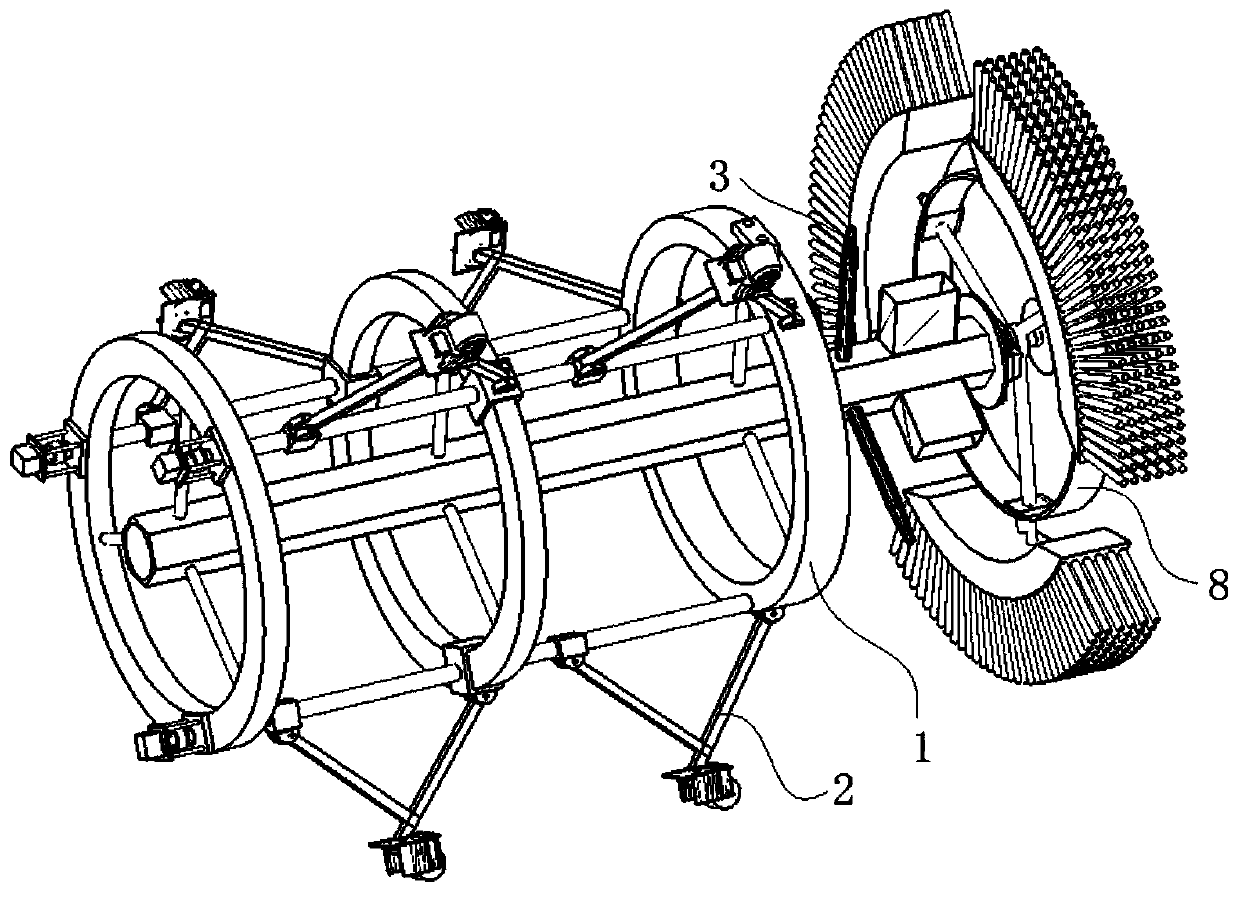
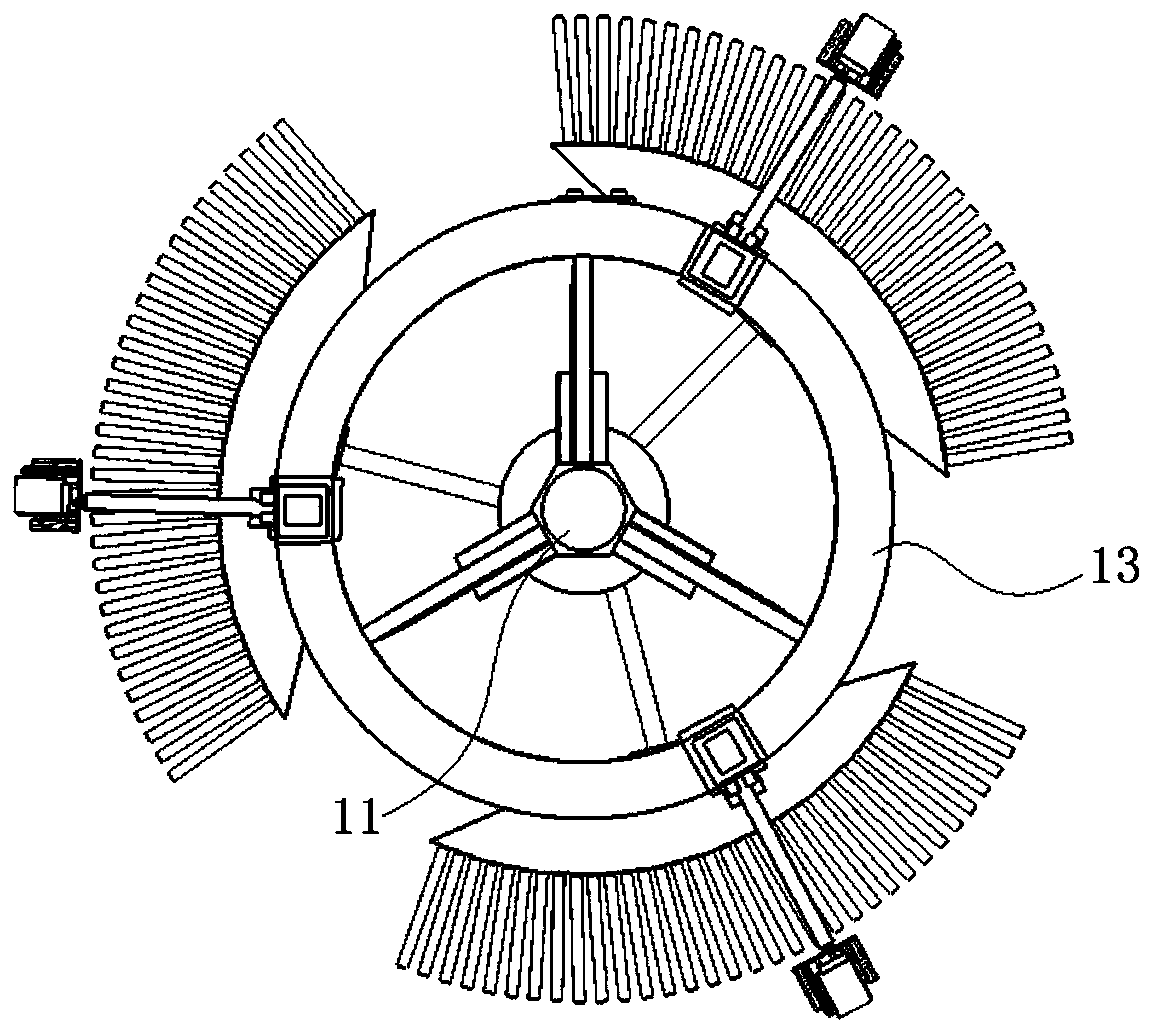
[0033] Such as Figure 1-2 As shown, this embodiment provides a pipeline inner wall spraying robot with adaptive pipe diameter, including a main frame body 1, a motion mechanism 2 and a spraying mechanism 3, the main frame body 1 is used as a fixed base, and the main frame body 1 is a cylinder as a whole Shaped frame structure, specifically, the main frame body 1 includes a main pipe 11, connecting rods 12 and three support rings 13, each support ring 13 is arranged in parallel and aligned at equal intervals, the main pipe 11 runs through the center of each support ring 13, and The connecting rods 12 are connected and fixed with each support ring 13 . Each member of the main frame body 1 is a hollow part to reduce the overall weight of the robot and facilitate walking, such as Figure 4 As shown,.
[0034] Among them, such as Figure 5As shown, the movement mechanism 2 includes a diameter reducing device 4 and a driving wheel assembly 5. The diameter reducing device 4 is ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More