

A two-level path planning method for unmanned aerial vehicles with limited computing and storage capabilities
A technology of path planning and storage capacity, applied in navigation calculation tools, vehicle position/route/altitude control, instruments, etc., can solve the problems of insufficient obstacle avoidance ability and low data storage burden of UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described in detail below with reference to the drawings and embodiments.
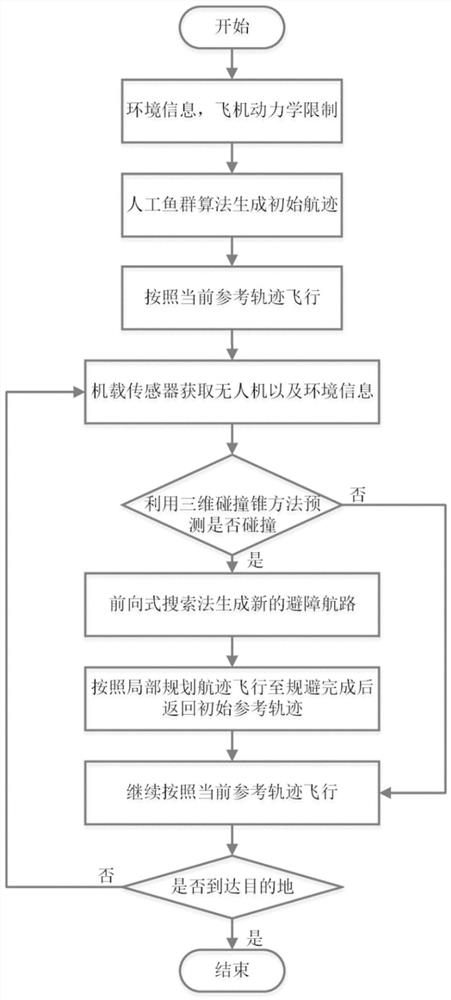
[0065] Such as figure 1 As shown, the present invention relates to a dual-layer path planning method with limited computing and storage capabilities for drones. The first step is to use the fish school algorithm to generate the initial reference track based on the existing map information and considering the limitations of the drone’s own dynamic performance; the second step is to use the airborne sensors to obtain environmental information such as the drone and surrounding obstacles. And use the three-dimensional collision cone technology to judge whether the obstacle poses a threat to the UAV; the third step, according to the judgment in the second step, if there is a threat, use the forward search method based on Markov process to generate the local obstacle avoidance path , Fly according to the partially planned trajectory. If there is no threat, the UAV ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More