

No-fly airspace unmanned aerial vehicle detection method
A detection method and UAV technology, applied in neural learning methods, computer parts, instruments, etc., can solve problems such as difficulty in detecting small targets of UAVs, confusion in detection of birds or other similar objects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] Below in conjunction with accompanying drawing, the present invention is described in further detail:
[0048] attached Figure 4 It is an overall flowchart, through which the technical solution of the present invention is specifically described.
[0049] 1) Split the original data, one part is the training set, the other part is the test set, and the ratio of the training set to the test set is 7:3. The training set is used for network training, and the test set is used for testing the trained model.
[0050] 2) Preprocessing the training set. The preprocessing operations include image cropping, scaling, flipping, shifting, brightness adjustment, adding noise and standardization. Through these preprocessing, an input image of fixed size 416*416 is obtained. At the same time, the label data of the image also needs to be processed accordingly. The images are then combined into a batch and fed into the network.
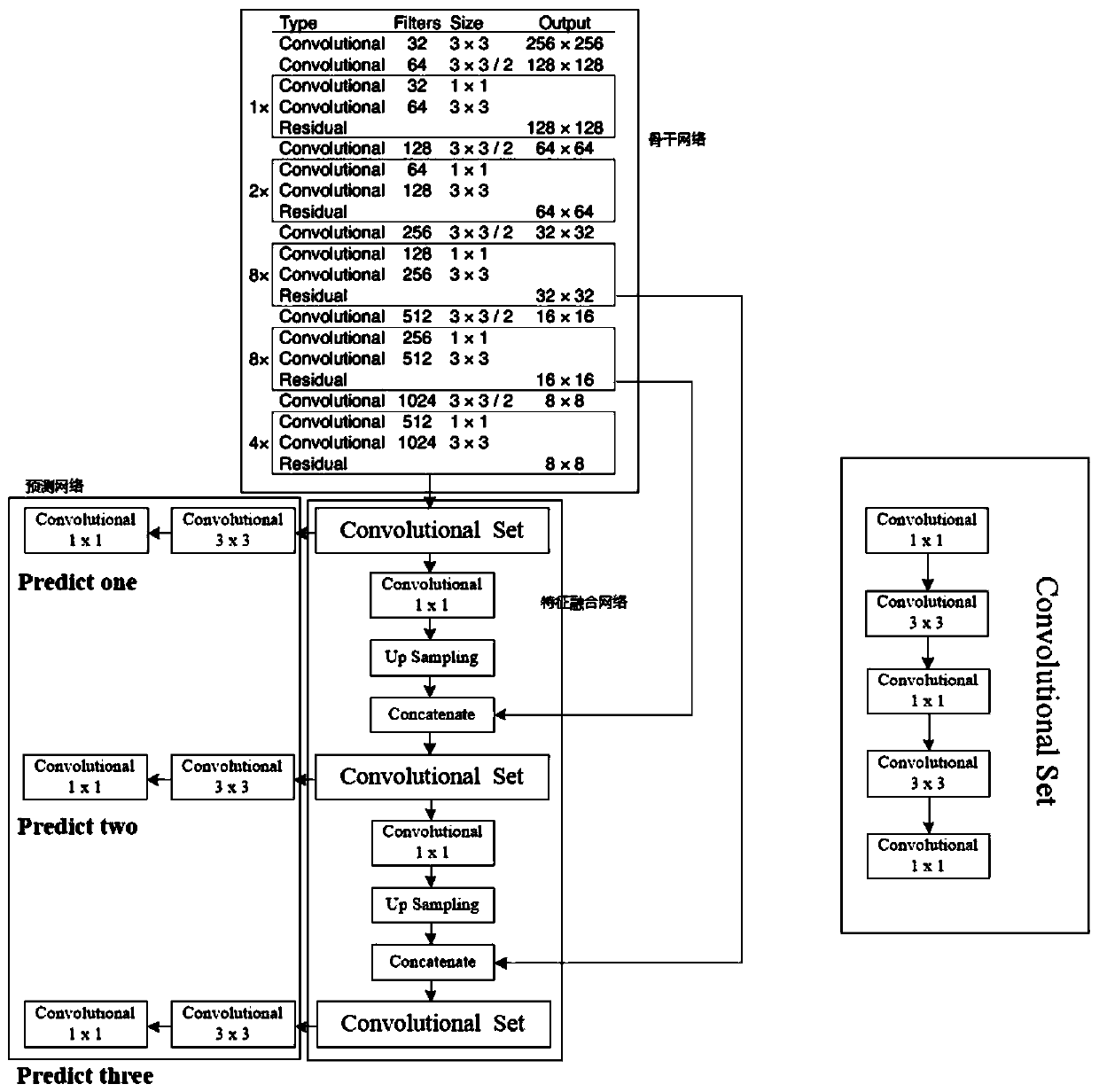
[0051] 3) The feature extraction network in the figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More