

A bidirectional motion pneumatic flexible driver and its working method
A flexible drive, two-way motion technology, applied in manufacturing tools, program-controlled manipulators, manipulators, etc., can solve the problems of increased gas pressure, limited external space, large volume, etc., and achieve the effect of effective auxiliary force and simple structure design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The implementation of the present invention will be described in detail below in conjunction with specific embodiments.
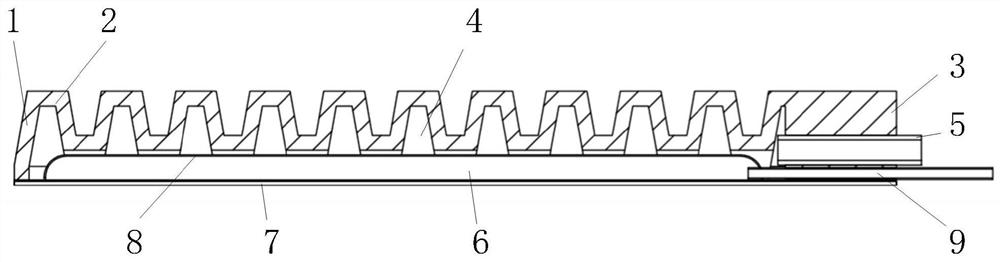
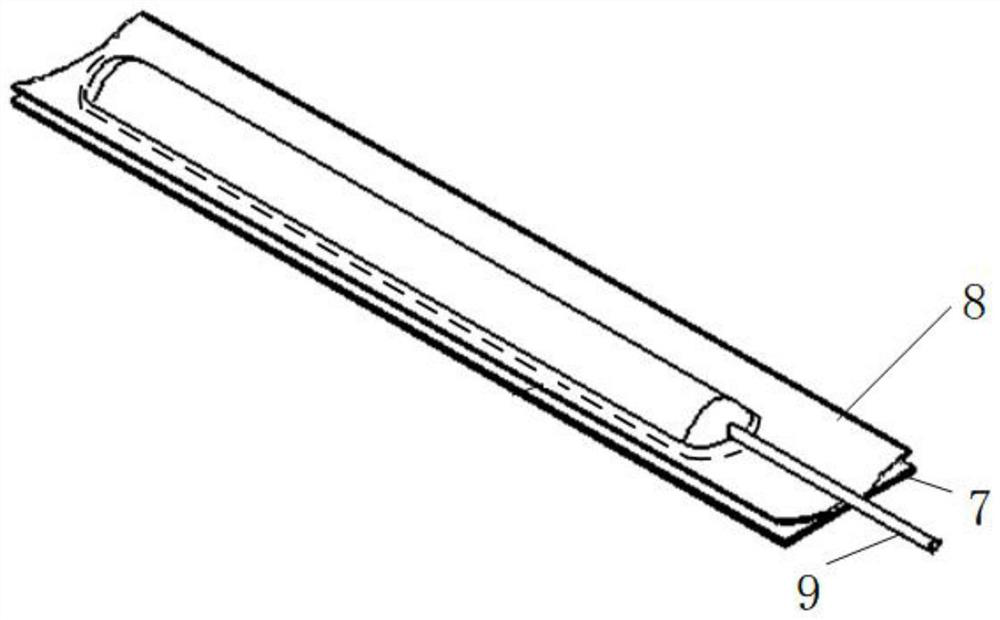
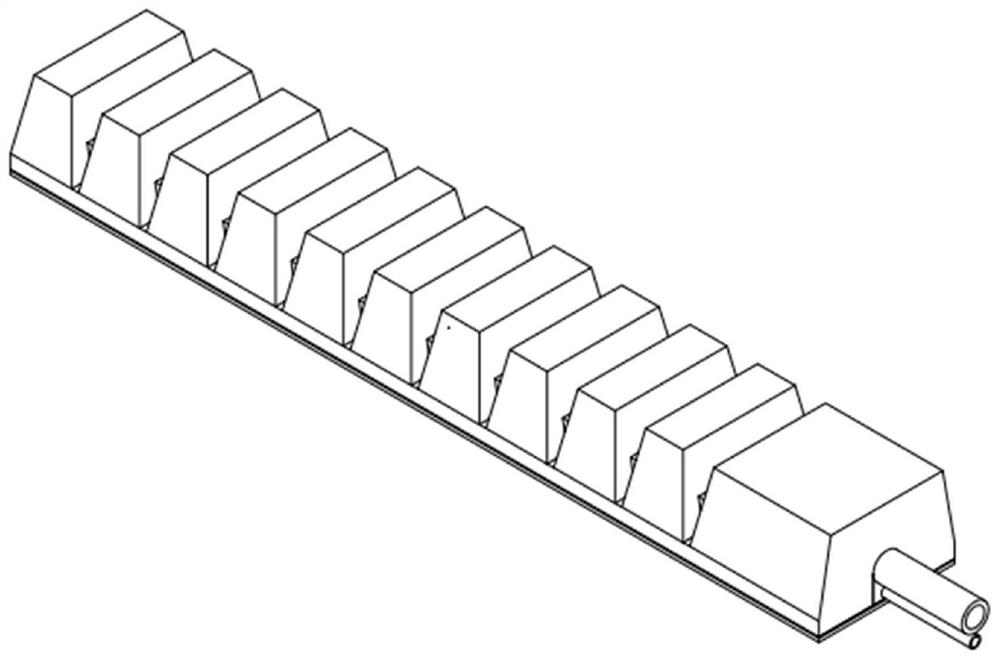
[0022] Such as Figure 1-3 As shown, a bidirectional motion pneumatic flexible driver includes a top air chamber 4 and a bottom air chamber 6, and the bottom air chamber 6 includes an upper plastic sheet 8, a lower plastic sheet 7 and a first flexible pipe 9, and the upper plastic sheet 8 and the lower plastic sheet 7 are connected by thermoplastic edge sealing so as to form an upwardly raised strip-shaped bottom cavity between the upper plastic sheet 8 and the lower plastic sheet 7, and one end of the first flexible pipe 9 communicates with the bottom cavity, The other end communicates with the air source or the atmosphere. The top air chamber 4 includes an elastic top air chamber wall and a second hose 5. The elastic top air chamber wall includes an integrally cast top air chamber front Wall 1, the middle wall 2 of the top-layer air chamber and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More