

Tree climbing pruning robot with memory function and decision making function
A decision-making function and robot technology, applied in the field of machinery, can solve the problems of single function, no record of construction objects, low efficiency of tree maintenance and management, etc., and achieve the effect of increasing the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
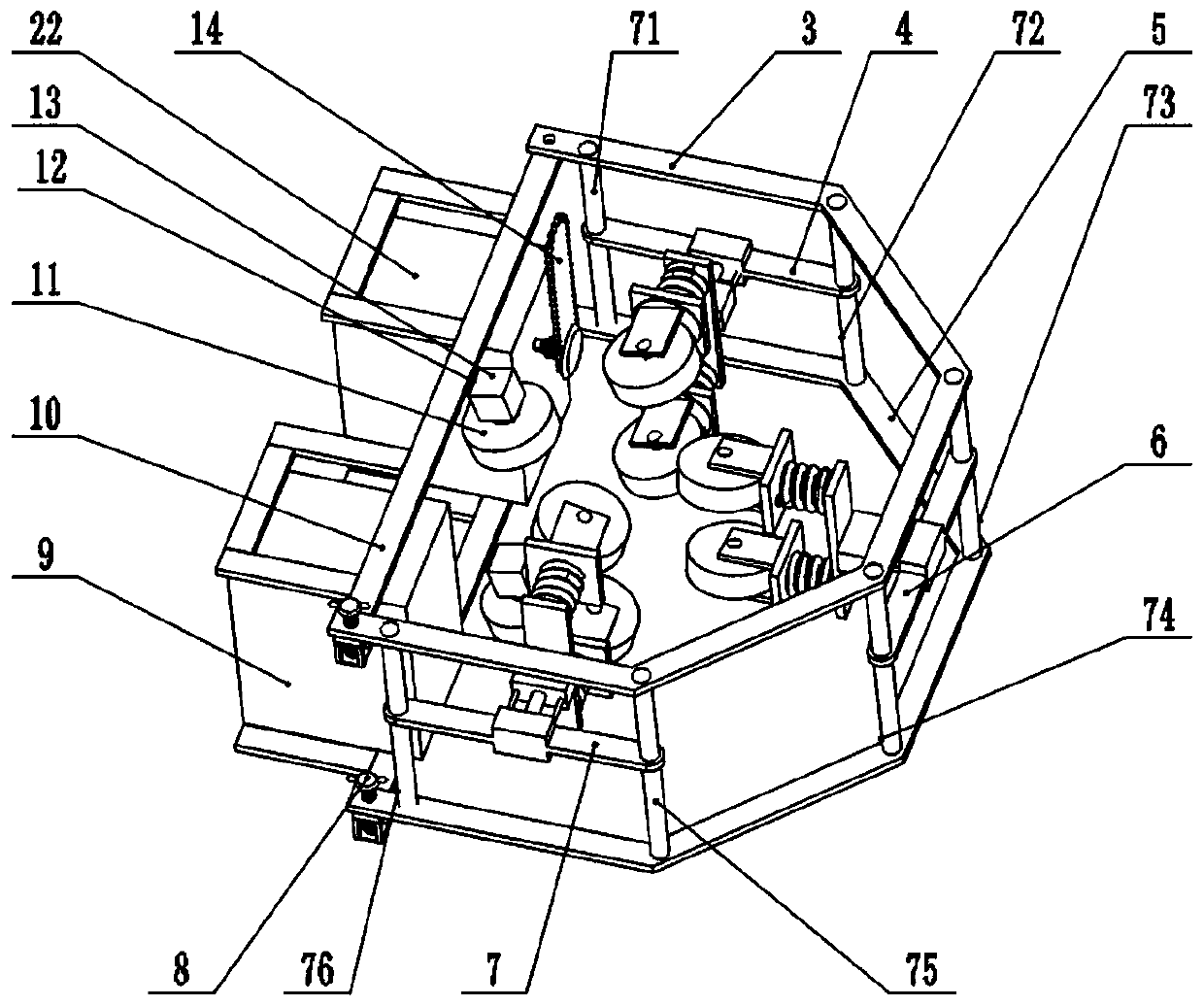
[0036] Such as figure 1 As shown, the present invention provides a tree-climbing and pruning robot with memory and decision-making functions, including a support, a door 10 and a driven wheel mechanism;
[0037] The support is mainly composed of an upper support 3, a lower support 5, and several intermediate supports and columns, providing skeleton support for the tree climbing and pruning robot; a column a71, a column b72, a column b72, Column c73, column d74, column e75 and column f76; the middle bracket a4 is fixedly connected between the column a71 and the column b72, the middle bracket b6 is fixedly connected between the column c73 and the column d74, the column e75 and the column Intermediate bracket c7 is fixedly connected between f76; screw motors are all housed on the intermediate bracket a4, intermediate bracket b6 and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More