

Adaptive dynamic map grid generation method for robot navigation
A dynamic map and grid generation technology, applied in the direction of adaptive control, motor vehicles, instruments, etc., can solve the problem of increasing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and beneficial technical effects of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific implementations described in this specification are only for explaining the present invention, not for limiting the present invention.
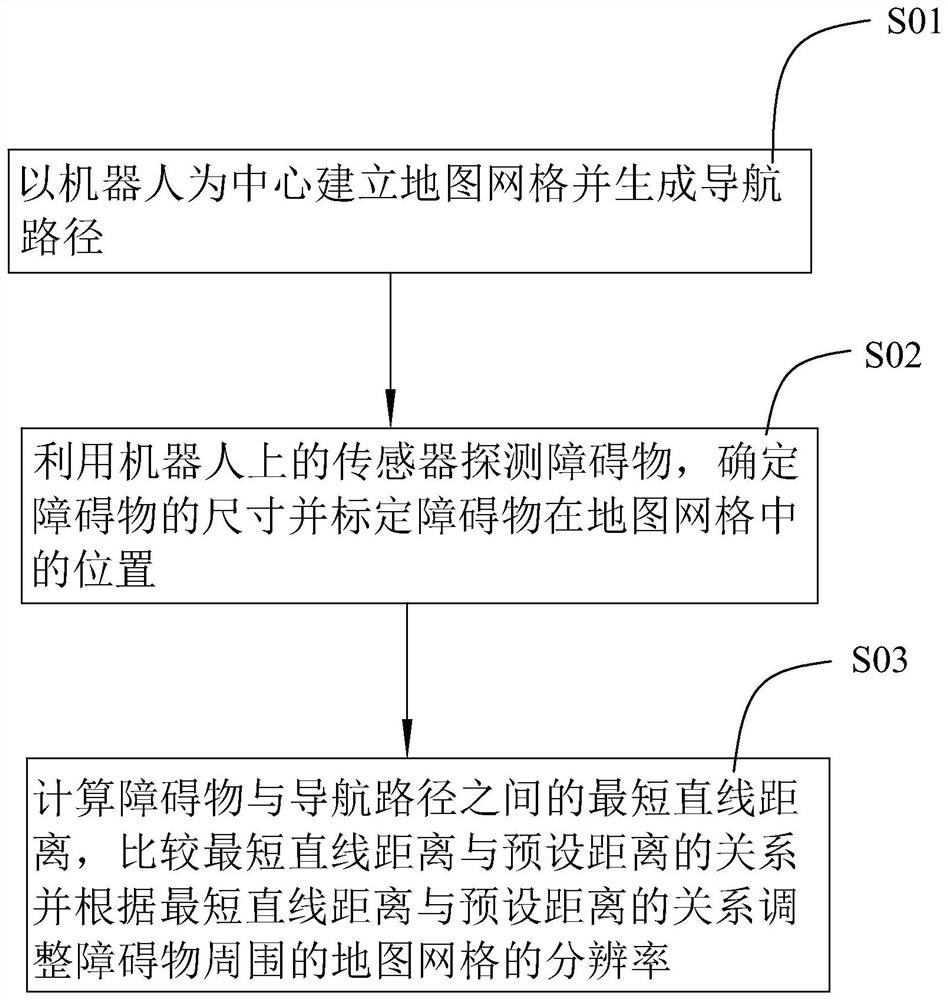
[0032] Please refer to Figure 1 to Figure 3 , the present invention provides a method for generating an adaptive dynamic map grid for robot navigation, comprising the following steps:
[0033] Step S01, establishing a map grid centered on the robot and generating a navigation path.
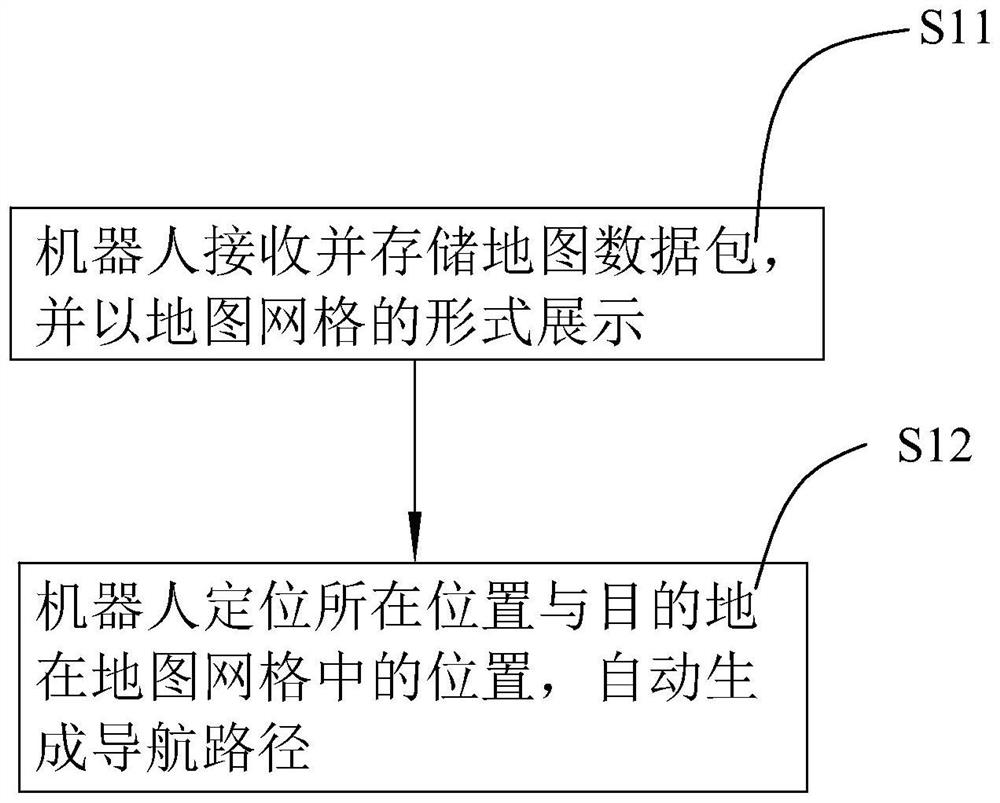
[0034] Specifically, the step S01 also includes the following steps:
[0035] Step S11, the robot receives and stores the map data package, and displays it in the form of a map grid. The robot receives the map data packet of the location through the network or the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More