

Quadrotor unmanned aerial vehicle attitude fault-tolerant control method based on adaptive terminal sliding mode
A technology of quadrotor UAV and self-adaptive terminal, which is applied in self-adaptive control, attitude control, general control system, etc., and can solve problems such as inconsistency of failure factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
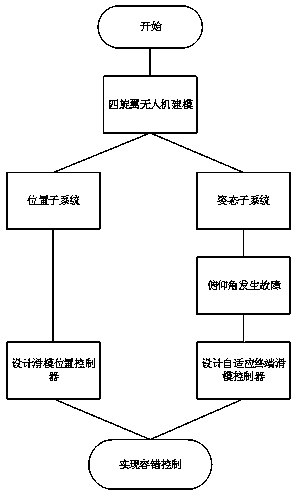
[0032] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with examples, which are only used to explain the present invention and do not constitute a limitation to the protection scope of the present invention. Such as Figure 1-12 As shown, this embodiment provides a quadrotor UAV attitude fault-tolerant control method based on adaptive terminal sliding mode, and the steps of the method are as follows:
[0033] Step S1: Establishing a mathematical model for constructing a quadrotor UAV based on the Lagrange-Newton equation;
[0034]
[0035] Among them: φ, θ, ψ are the roll angle, pitch angle and yaw angle of the quadrotor UAV respectively; x, y, z are the position coordinates of the centroid of the quadrotor UAV; l is the distance from the end of the rotor to the front end of the rotor ; m is the mass of the quadrotor UAV, I is the moment of inertia of each axis, K 1 ~K 6 is the drag coeff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More