

Double-wheel-foot hybrid self-balancing robot
A robot and self-balancing technology, applied in the field of robotics, can solve problems such as not easy decoupling, many driving motors, and long time-consuming switching modes, and achieve the effect of easy decoupling and optimization of the center of mass position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
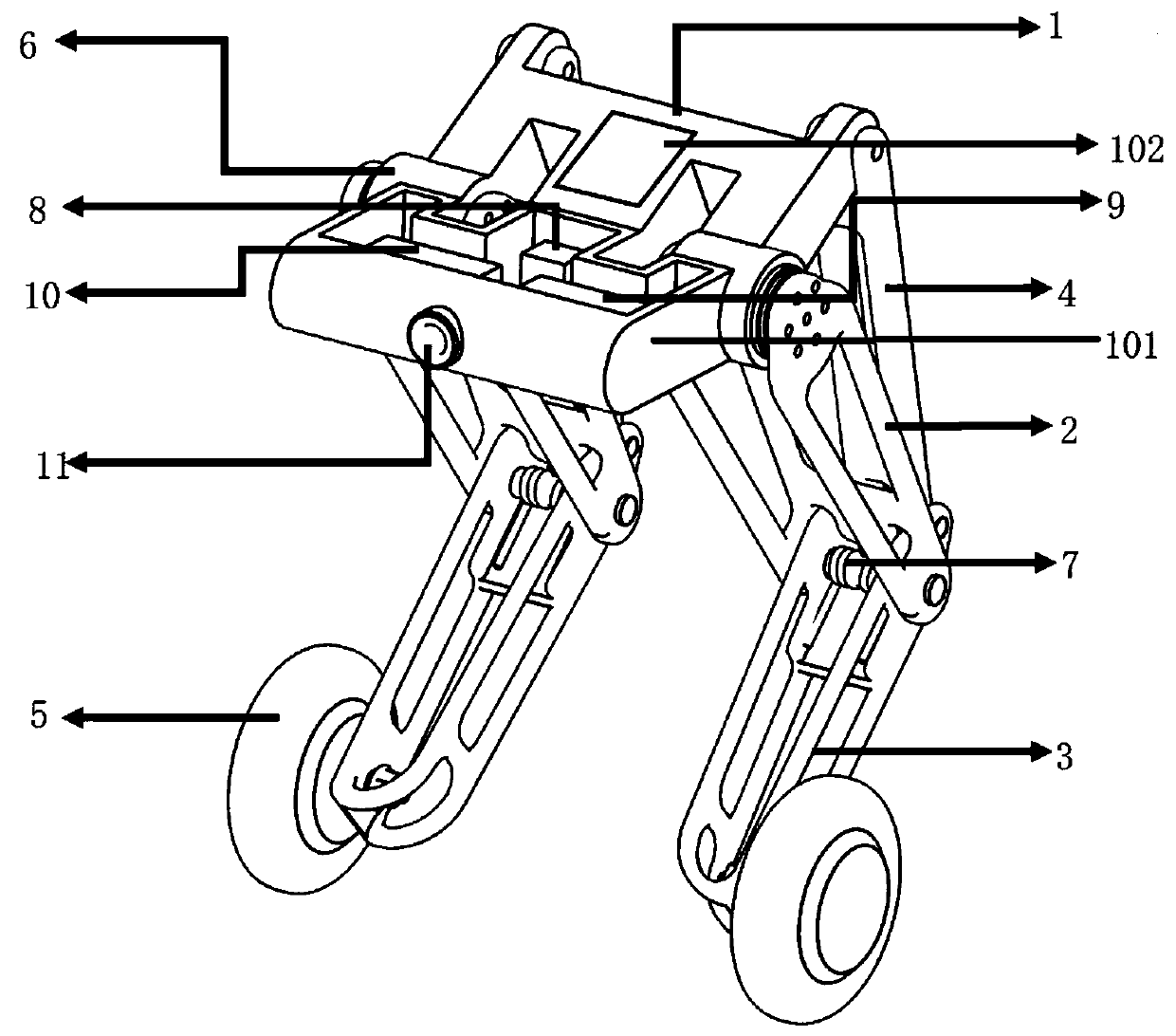
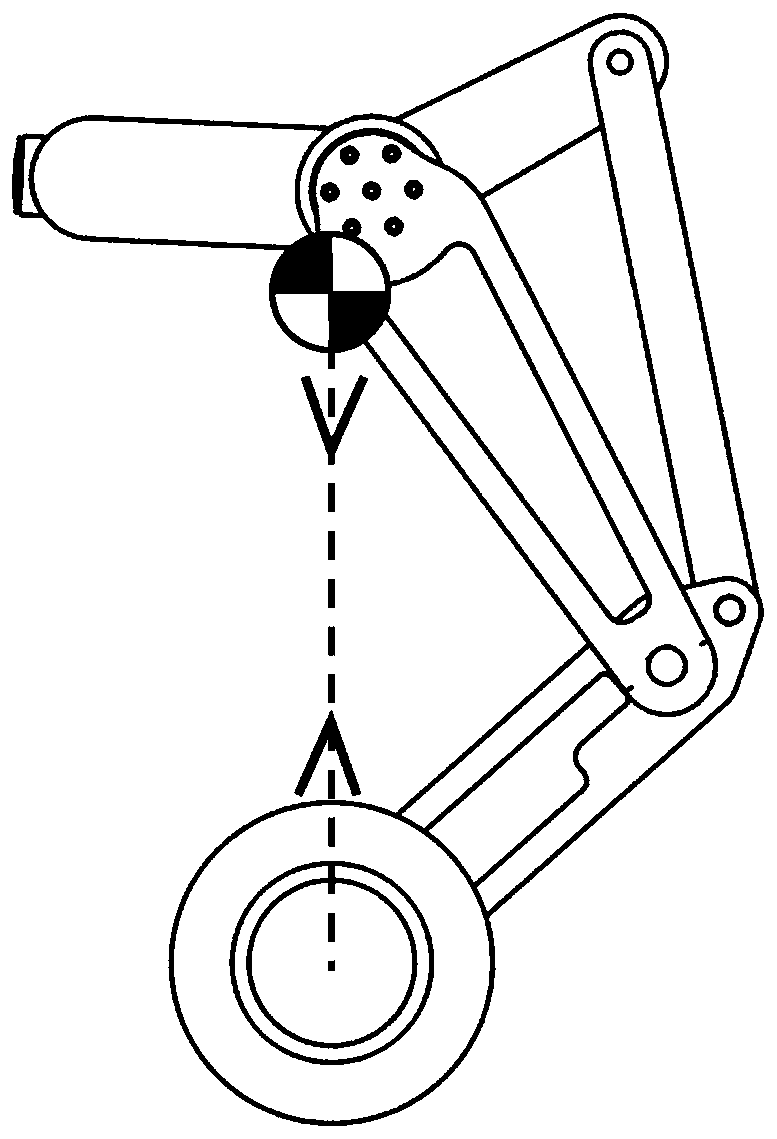
[0025] refer to Figure 1-4 As shown, the dual-wheel-foot hybrid self-balancing robot provided in this embodiment includes a torso support 1, and outrigger assemblies are arranged symmetrically on both sides of the torso support, that is to say, the entire robot has a left-right symmetrical structure. Specifically, the torso support 1 is divided into a box mounting portion 101 and a connecting rod mounting portion 102. The opposite sides of the connecting rod mounting portion 102 extend outward to form an auxiliary leg connecting rod mounting position. 101 and the connecting rod installation part 102 at the transition joint position between the two as the hip joint motor installation position.
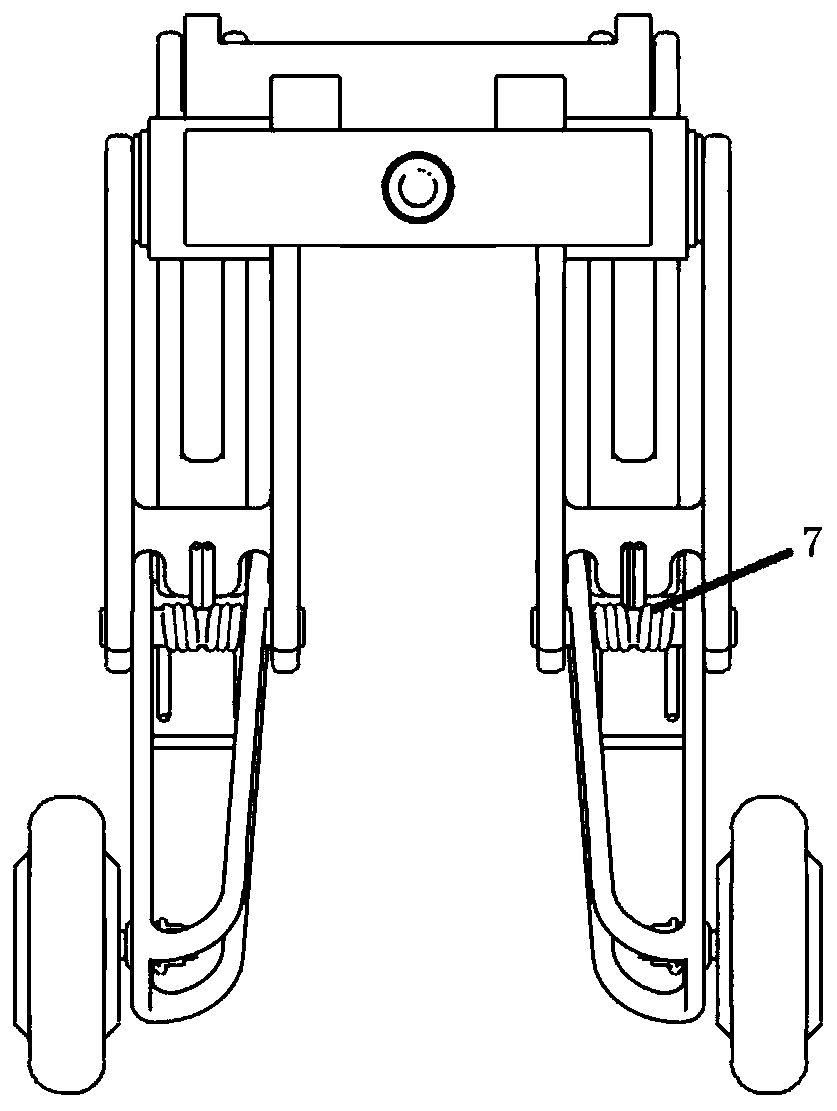
[0026] Wherein, the outrigger assembly includes a thigh support 2, a calf support 3, an auxiliary leg link 4, a hub motor 5, a hip joint motor 6 and a knee joint energy storage spring 7; the hub motor 5 is installed at the bottom of the calf support 3 to To realize the forward walking...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More