

A path planning method, device and control system for an ultra-redundant manipulator
A path planning, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the inefficiency of path planning, reduce the efficiency of real-time online path planning of super-redundant manipulators, and calculate the inverse solution of super-redundant manipulators increase in volume, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
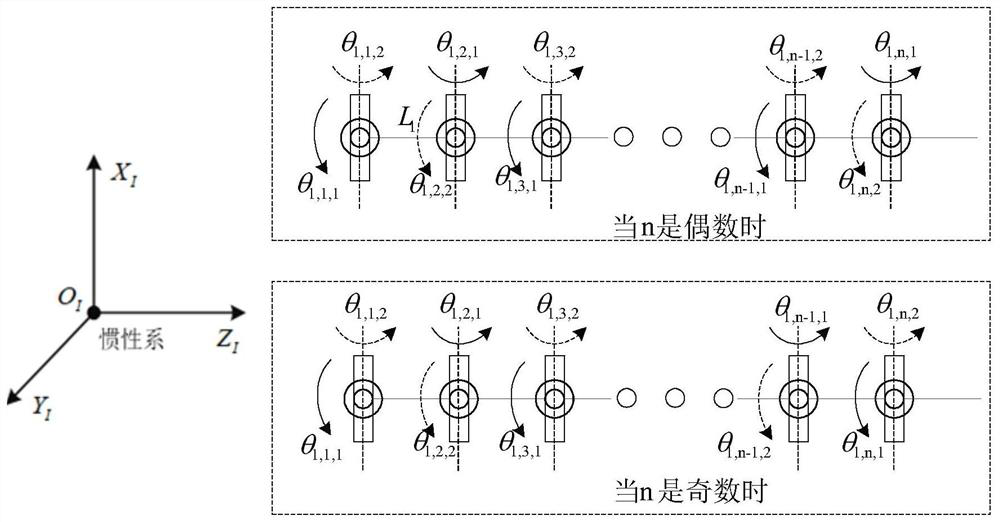
[0046] An embodiment of the present invention provides a path planning method for a super-redundant robotic arm, such as figure 1 as shown, figure 1 It is a schematic structural diagram of a super-redundant robotic arm in an embodiment of the present invention; wherein, the super-redundant robotic arm includes N arm segments in total, which are respectively marked as S 1 to S N , where S 1 Indicates from base B 0 nearest first arm segment, S N Indicates from base B 0 The farthest arm segment; specifically, n represents the number of segments contained in each arm segment of the super-redundant manipulator, and each segment corresponds to a joint one by one, and the two segments are connected by joints in turn, then B i,j The j-th subsection of the i-th arm segment of the hyper-redundant manipulator, J i,j Indicates the j-th joint of the i-th arm segment of the super-redundant manipulator, and E represents the end of the super-redundant manipulator. refer to figure 2 ,...
Embodiment 2
[0143] In the embodiment of the present invention, based on the path planning method of the hyper-redundant manipulator described in Embodiment 1, it further includes after step S50 and before step S60:
[0144] S510. Obtain terminal expected position information and terminal expected pointing information according to expected arm shape parameters;
[0145] S511. Set the error range requirement. When the error between the terminal expected position information and the target expected position information meets the error range requirement, and when the error between the end expected pointing information and the target’s expected pointing information meets the error range requirement, execute step S60, otherwise return Execute step S20.
[0146] Specifically, after obtaining the parameters of the current equivalent arm shape, obtain the current position information and the current pointing information of the end of the equivalent arm shape of the super-redundant manipulator, and...
Embodiment 3
[0148] refer to Figure 5 , an embodiment of the present invention provides a path planning device for a super-redundant manipulator, wherein the super-redundant manipulator includes a plurality of arm segments, and each of the plurality of arm segments includes a plurality of subsections. Joint connection, multiple joints in the arm segment are labeled in order, and the odd-numbered joints are set as Pitch-Yaw type, and the even-numbered joints are set as Yaw-Pitch type, which includes:
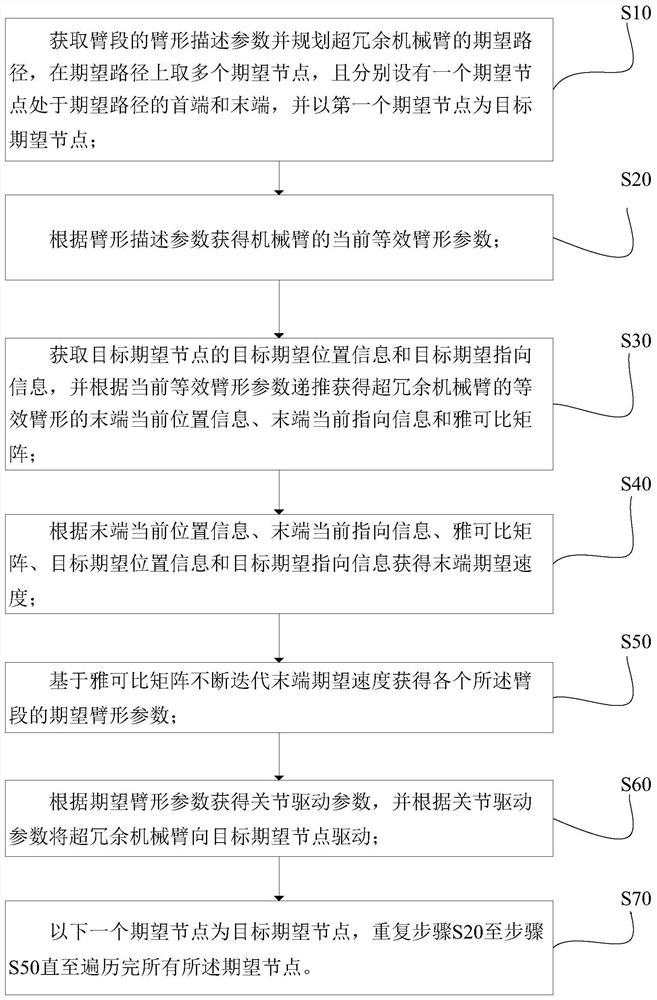
[0149]The arm shape description parameter acquisition and expected path planning module is used to obtain the arm shape description parameters of the arm segment and plan the expected path of the super-redundant manipulator, take multiple expected nodes on the expected path, and set an expected node at The head and end of the expected path, and the first expected node as the target expected node;
[0150] The current equivalent arm shape parameter acquisition module is used to obtain the cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More