

A speed estimation method for in-wheel motor driven vehicles based on multi-model fusion
A wheel hub motor and multi-model technology, applied in the direction of control devices, can solve problems such as impact estimation accuracy, divergence, and difficulty in ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] In order to make the object, technical solution and points of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings.
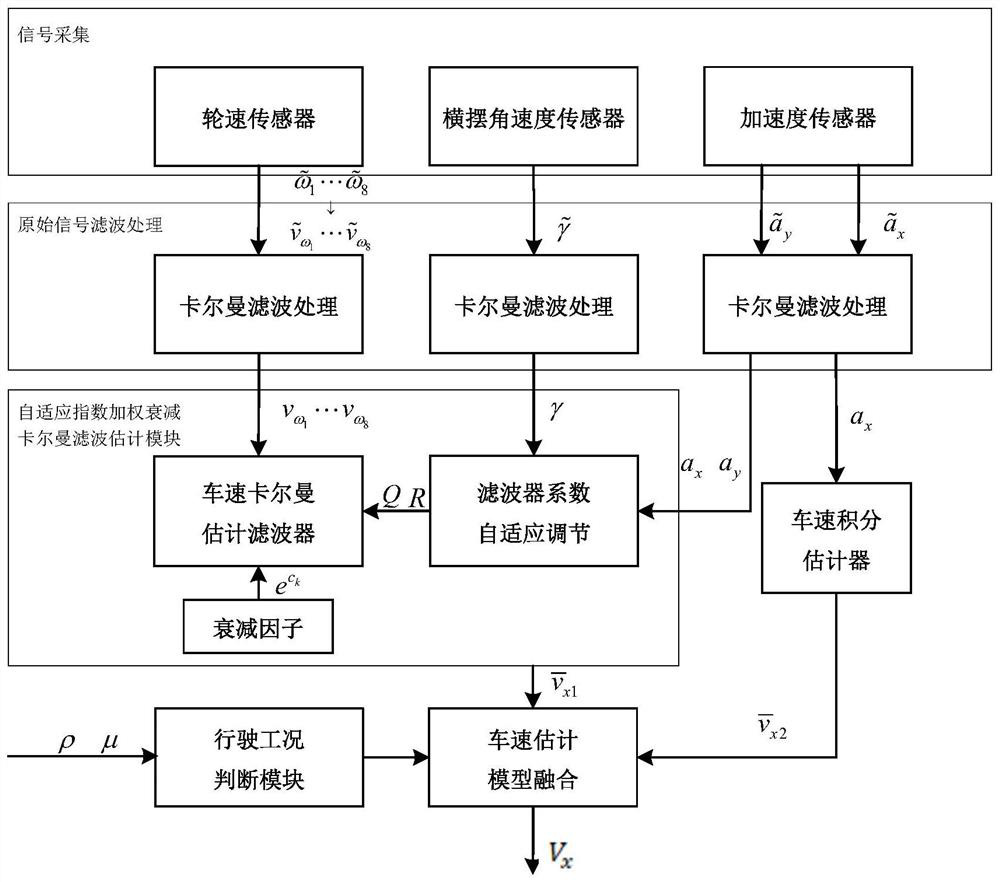
[0081] Take the 8×8 hub motor drive vehicle as an example, such as figure 1 As shown, the wheel speed signals are collected from common vehicle sensors, including wheel speed sensors, acceleration sensors, and yaw rate sensors. Yaw rate signal longitudinal acceleration signal and lateral acceleration signal After that, calculate the wheel speed signal of each wheel and will and Perform filtering processing to reduce burrs and errors of the original signal. Then, the filtered signal gamma, a x 、a y Input the vehicle speed Kalman estimation filter, adaptively adjust the process noise variance Q and measurement noise variance R, use the exponential decay memory factor to correct the state vector estimation error, and obtain the vehicle speed based on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More