

A vehicle speed control method, system, and vehicle in a turning scene
A vehicle speed control and vehicle technology, which is applied to control devices, vehicle components, input parameters of vehicle conditions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
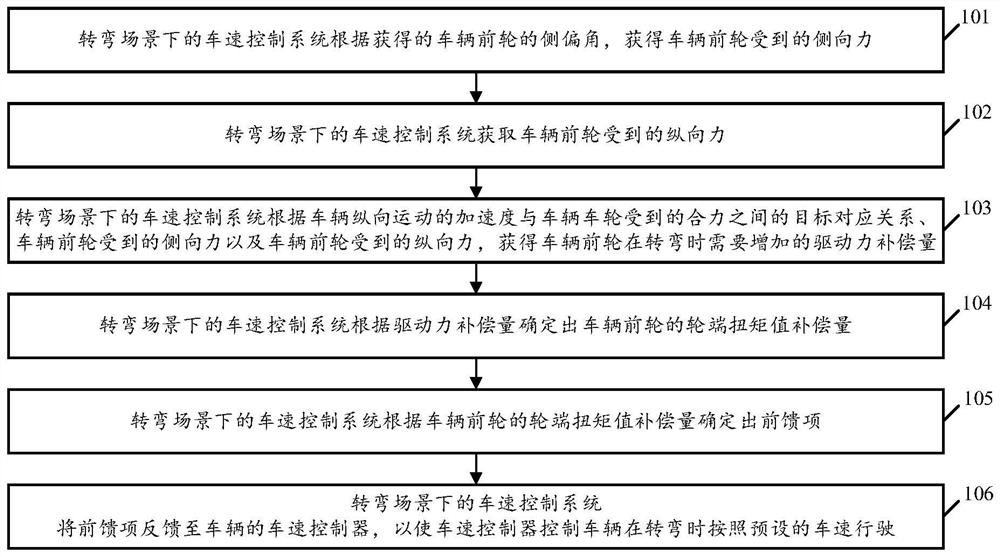
[0073] see figure 1 , figure 1 It is a schematic flowchart of a vehicle speed control method in a turning scene disclosed in an embodiment of the present invention. Such as figure 1 As shown, the vehicle speed control method in this turning scene may include the following steps:
[0074] 101. The vehicle speed control system in a turning scene obtains the lateral force on the front wheels of the vehicle according to the obtained side slip angle of the front wheels of the vehicle.
[0075] In the embodiment of the present invention, the vehicle speed control method in the turning scene can be applied to front-wheel steering and front-wheel drive vehicles; Wheel steering and rear wheel drive vehicles, or front wheel steering and front and rear wheel drive vehicles, the embodiments of the present invention are not limited; the embodiments of the present invention are described as examples of front wheel steering and front wheel drive vehicles, and should not be implemented in ...
Embodiment 2
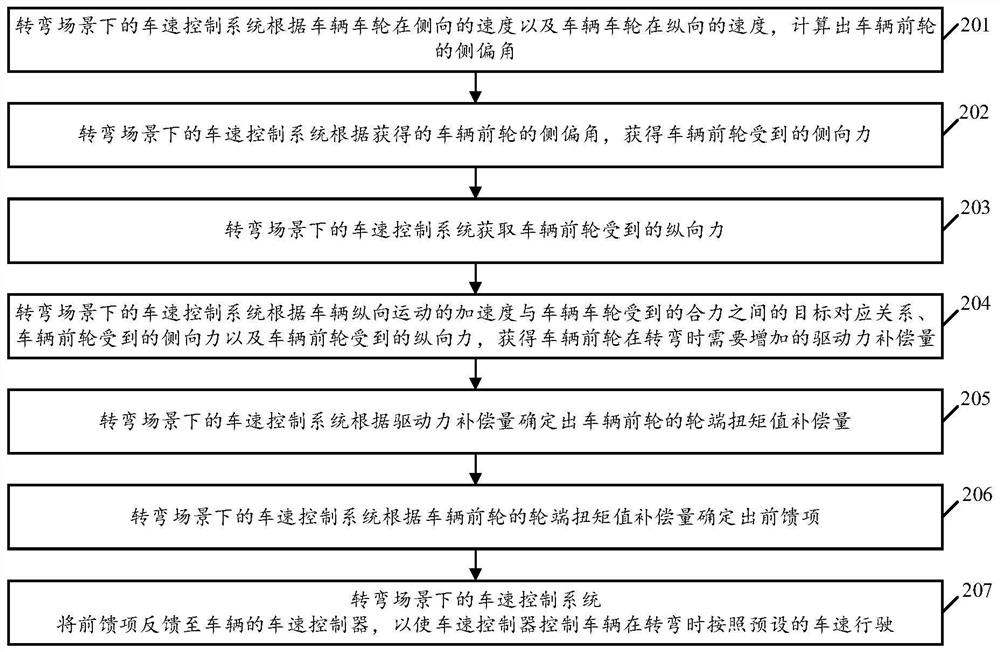
[0127] see figure 2 , figure 2 It is a schematic flowchart of another vehicle speed control method in a turning scene disclosed in an embodiment of the present invention. Such as figure 2 As shown, the vehicle speed control method in this turning scene may include the following steps:
[0128] 201. The vehicle speed control system in a turning scene calculates the side slip angle of the front wheels of the vehicle according to the lateral speed of the vehicle wheels and the longitudinal speed of the vehicle wheels.
[0129] In the embodiment of the present invention, the vehicle speed control system in the turning scene can be based on the lateral speed v of the vehicle wheel c , the speed v of the vehicle wheel in the longitudinal direction l And combine the following formula to calculate the side slip angle of the front wheel of the vehicle, namely:
[0130] alpha f =tan -1 (v c / v l )
[0131] Among them, α f Indicates the slip angle of the front wheels of the...
Embodiment 3
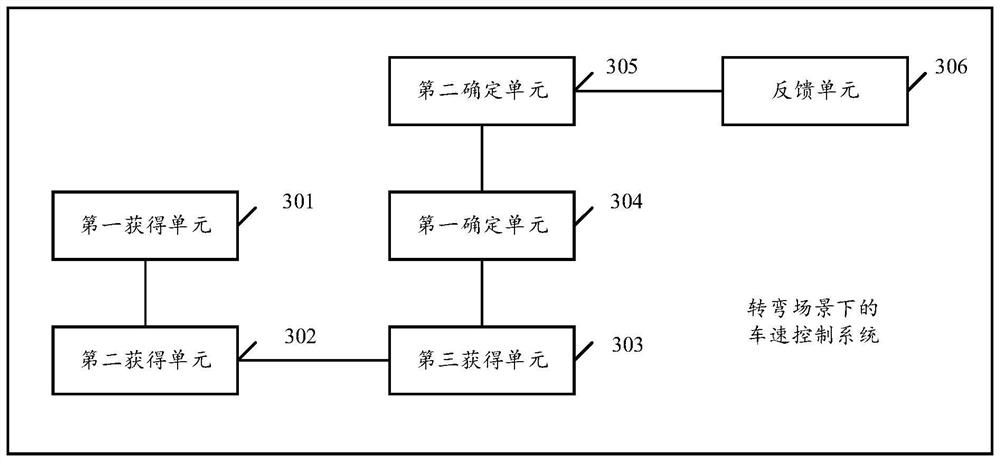
[0143] see image 3 , image 3 It is a schematic structural diagram of a vehicle speed control system in a turning scene disclosed in an embodiment of the present invention. see image 3 , the vehicle speed control system in this turning scene may include:
[0144] The first obtaining unit 301 is configured to obtain the lateral force on the front wheels of the vehicle according to the obtained slip angle of the front wheels of the vehicle;
[0145] The second obtaining unit 302 is configured to obtain the longitudinal force received by the front wheels of the vehicle according to the moment balance relationship of the front wheels of the vehicle;
[0146] The third obtaining unit 303 is configured to obtain the driving force compensation amount that the front wheels of the vehicle need to increase when turning according to the target correspondence, the lateral force on the front wheels of the vehicle, and the longitudinal force on the front wheels of the vehicle;
[0147...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More