

Wall-climbing robot
A wall-climbing robot and deceleration motor technology, applied in the field of wall-climbing robots, can solve problems such as easy collision with obstacles, low degree of freedom of movement, large turning radius, etc., and achieve light weight, easy operation, easy installation and disassembly Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
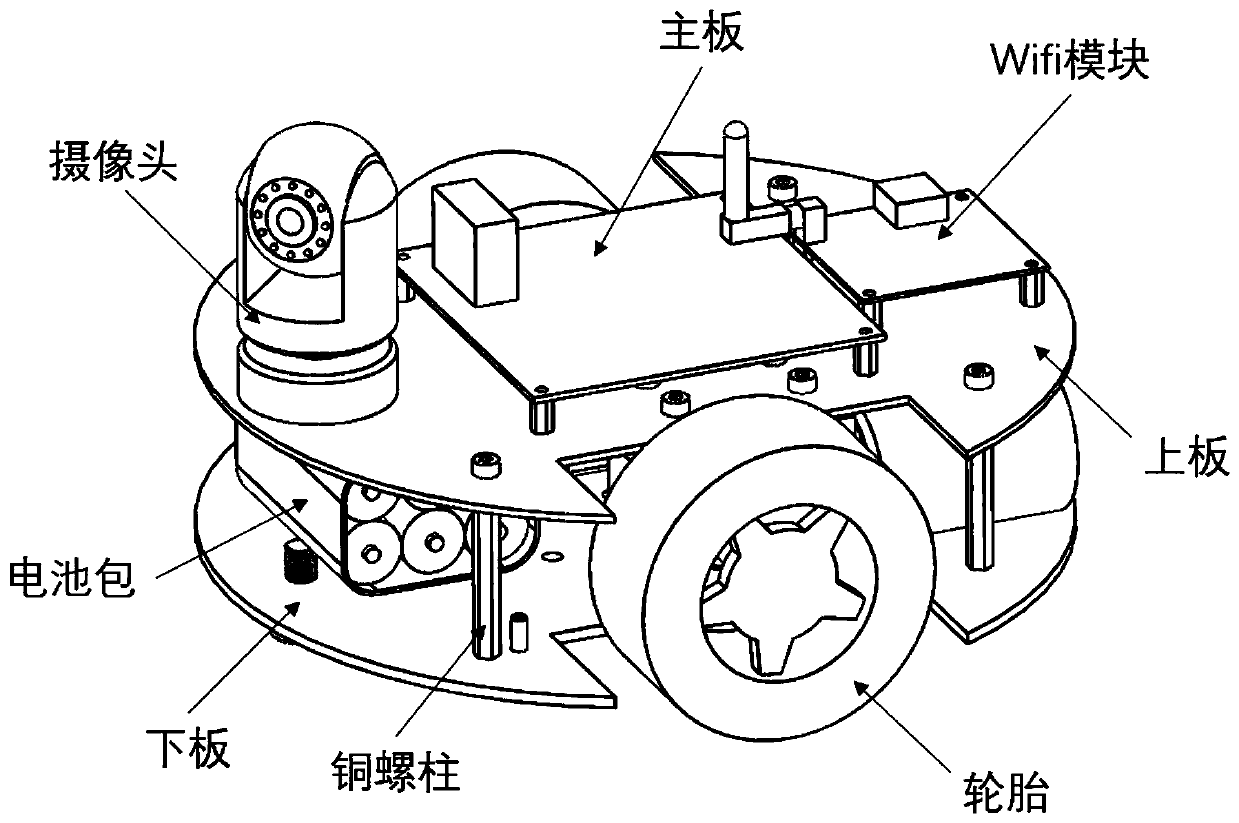
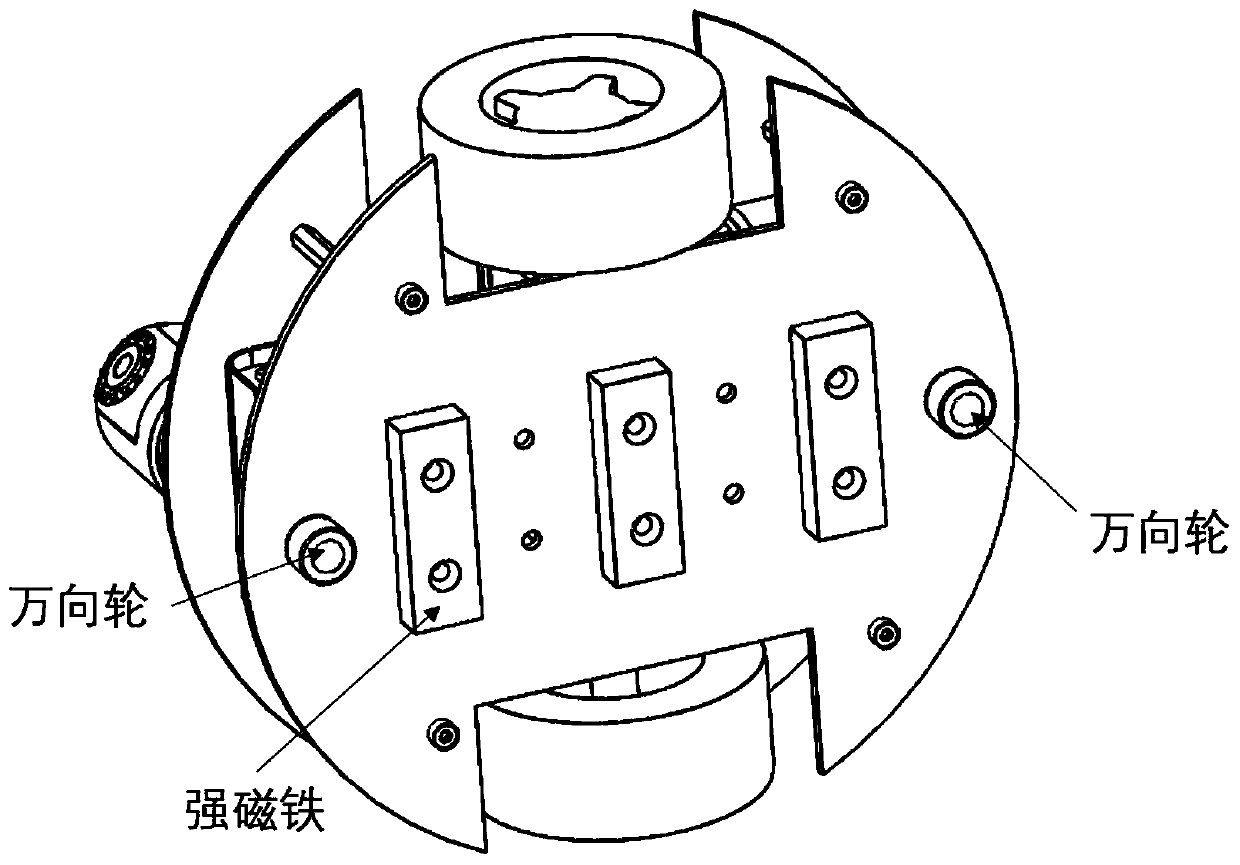
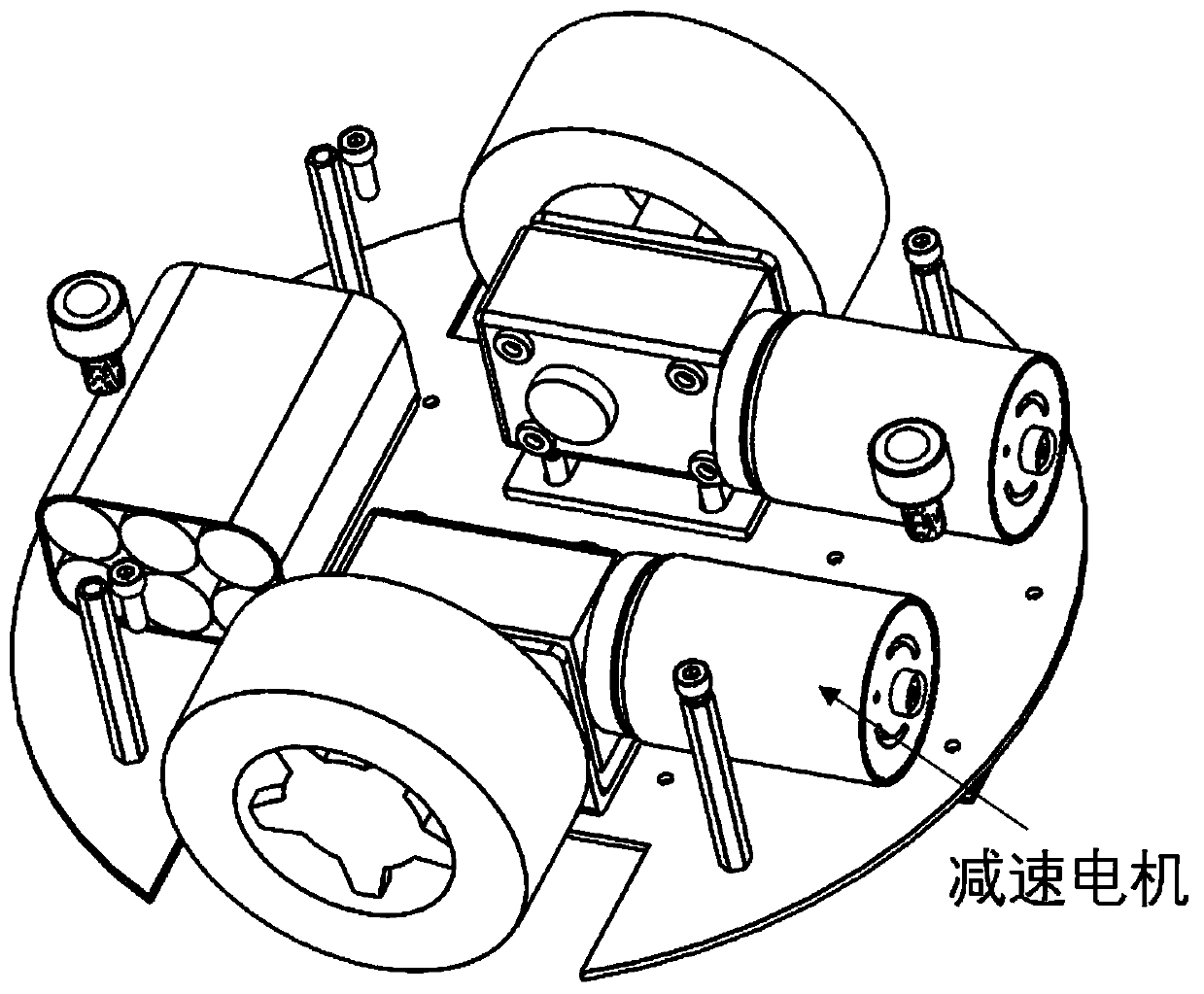
[0024] The embodiment of the present invention firstly provides a wall-climbing robot, including: a car body, a main control module, a power module, a geared motor, two rollers, a universal wheel, a magnet and an operation module. The main control module includes a necessary main board, on which are provided control chips such as a single-chip microcomputer, FPGA, necessary memory chips, and the like. The main control module is electrically connected to the power supply module and the operation module, and the power supply module can provide working voltages such as +5V, +12V, +24V, etc. according to work requirements. The main control module is powered by the power supply module and controls the operation module to perform operations. The specific operation modules can have different collocations according to different application scenarios, such as image acquisition devices used for monitoring scenarios, or flaw detection equipment for detection scenarios, etc. Structurally,...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More