

A multi-TOF camera human body noise reduction method based on a downward inclination angle direction
A technology of TOF camera and noise reduction system, applied in the field of image processing, can solve the problems of high algorithm complexity, inapplicability, immature embedded technology, etc., and achieve the effect of solving high complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0068] A human body noise reduction method for multiple TOF cameras based on the downward tilt direction, such as Figure 6 shown, including the following steps:
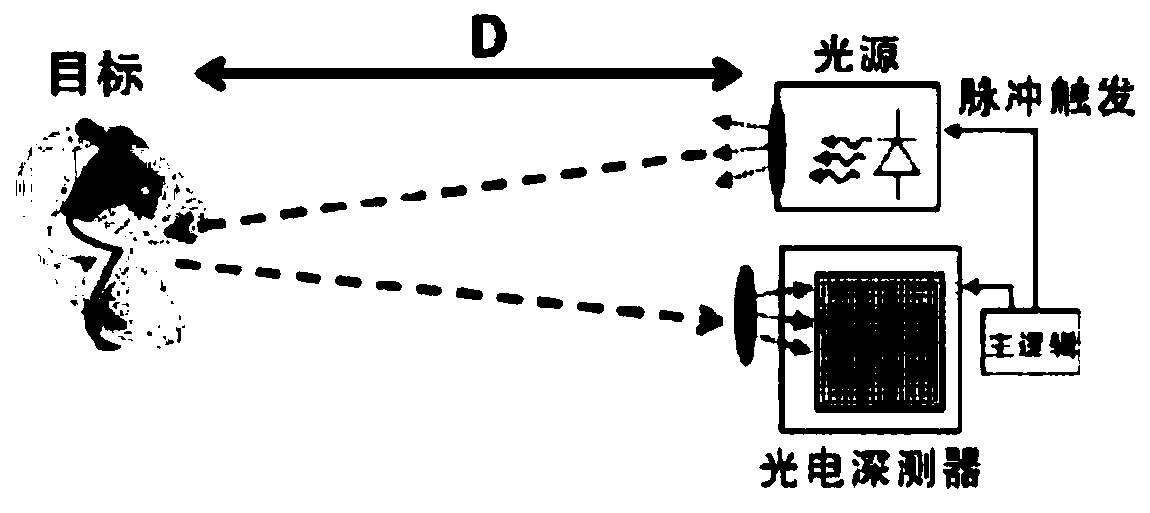
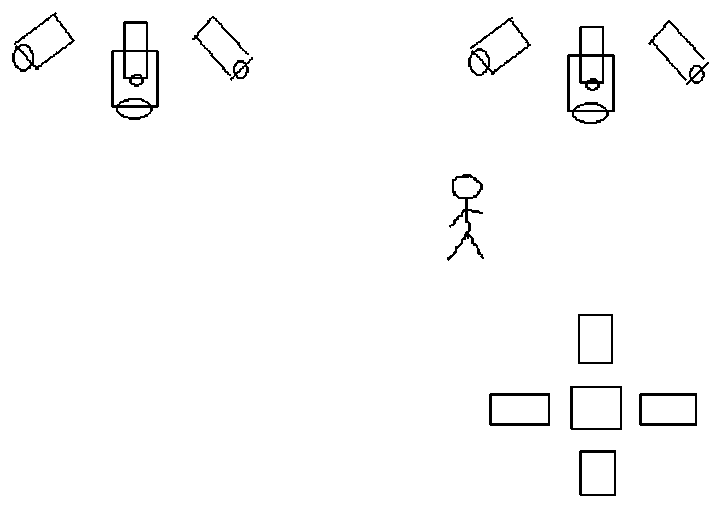
[0069] S100. Acquiring three-dimensional point cloud data of the human body of multiple TOP cameras;
[0070] S200, mapping the three-dimensional point cloud data of all human bodies into two-dimensional images, and obtaining the mapped two-dimensional images corresponding to a plurality of TOP cameras;
[0071] S300. Carry out morphological filter processing to all two-dimensional images, adopt open operation mode to process, remove the noise of human body edge, obtain the two-dimensional image after filtering;
[0072] S400. Perform background difference processing on the filtered two-dimensional image to obtain a depth image with only the human body;
[0073] S500. Perform endpoint recognition processing on each depth image with only a human body to obtain each endpoint of the human body in the depth image;
...
Embodiment 2
[0093] A human body noise reduction system for multiple TOF cameras based on the downward tilt direction, such as Figure 13 As shown, including acquisition module 100, mapping module 200, filtering module 300, difference module 400, endpoint identification module 500 and classification module 500:
[0094] The acquiring module 100 is used to acquire the three-dimensional point cloud data of the human body of multiple TOP cameras;
[0095] The mapping module 200 is used to map the three-dimensional point cloud data of all human bodies into two-dimensional images, and obtain the mapped two-dimensional images corresponding to multiple TOP cameras;
[0096] The filtering module 300 is used to perform morphological filtering processing on all two-dimensional images, and adopt an open operation method to process, remove noise at the edge of the human body, and obtain a filtered two-dimensional image;
[0097] The difference module 400 is used to perform background difference proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More