

An underwater unmanned vehicle formation plane track planning method
A technology for unmanned aerial vehicles and track planning, applied in the direction of instruments, two-dimensional position/course control, control/regulation systems, etc., can solve problems such as poor optimization, achieve the effect of optimizing track and realizing navigation conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091]The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
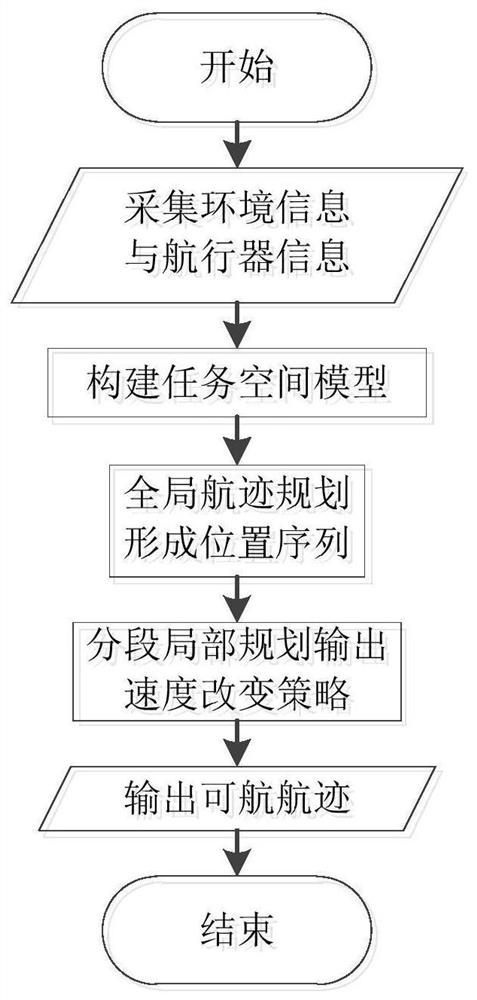
[0092] A method for planning a plane track of an underwater unmanned vehicle formation, which specifically includes the following steps:
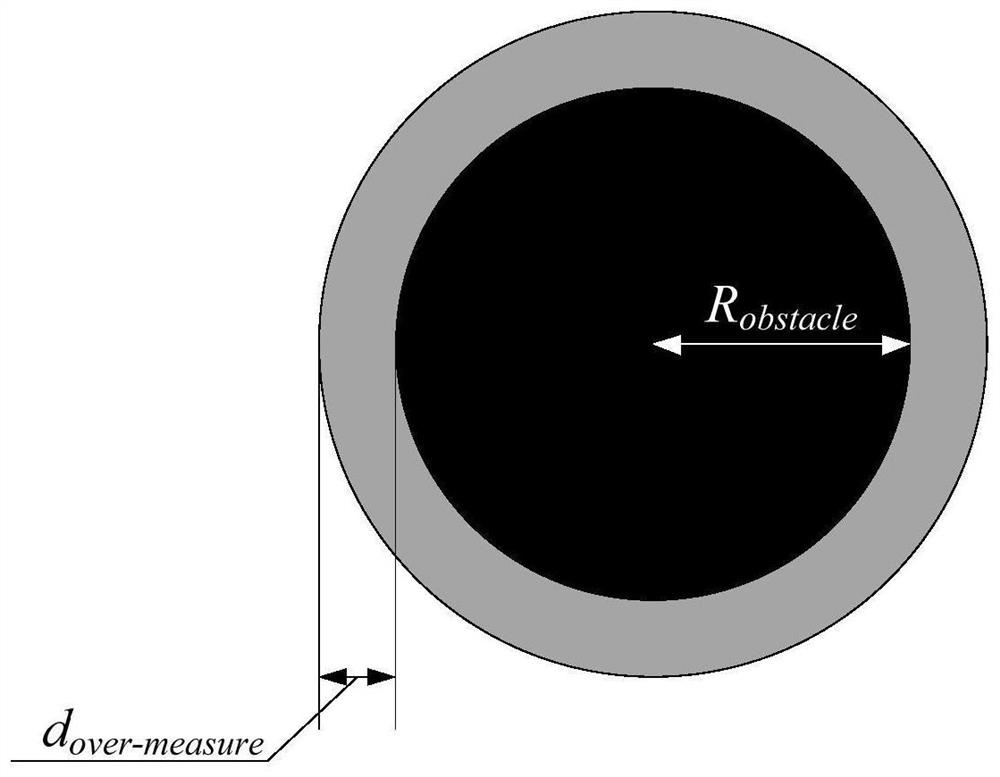
[0093] Step 1: Build a mission space model according to the environmental information database or the environmental information detected by sensors. Since the trajectory planning process is carried out in a two-dimensional space, the mission space is described as: Ω={(x,y)|x min ≤x≤x max ,y min ≤y≤y max ,z≡C}, where the center of the basic unit circle of the obstacle area is (x obstacle ,y obstacle ), with radius R obstacle , the puffing distance is d over-measure , whose model is attached figure 2 shown;
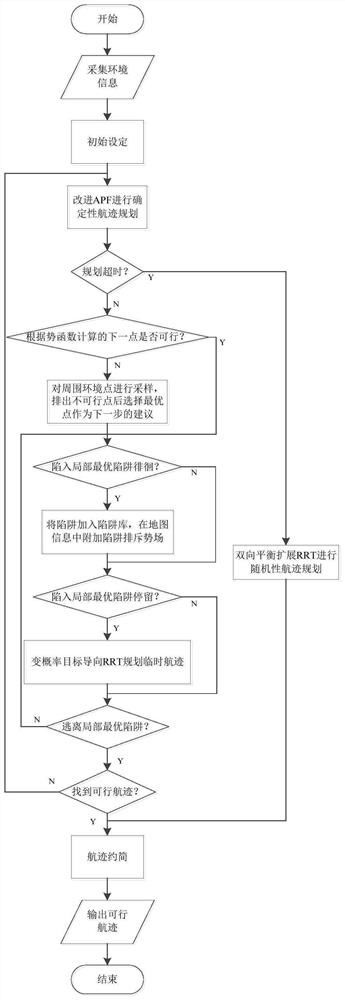
[0094] Step 2: Based on the static environment information, the improvement and fusion algorithm of Artificial Potential Field (APF) and Rapidly Expanding Random Tree (RRT) are used for gl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More